
Manual










YSI 5X00
143
YSI 5X00
142
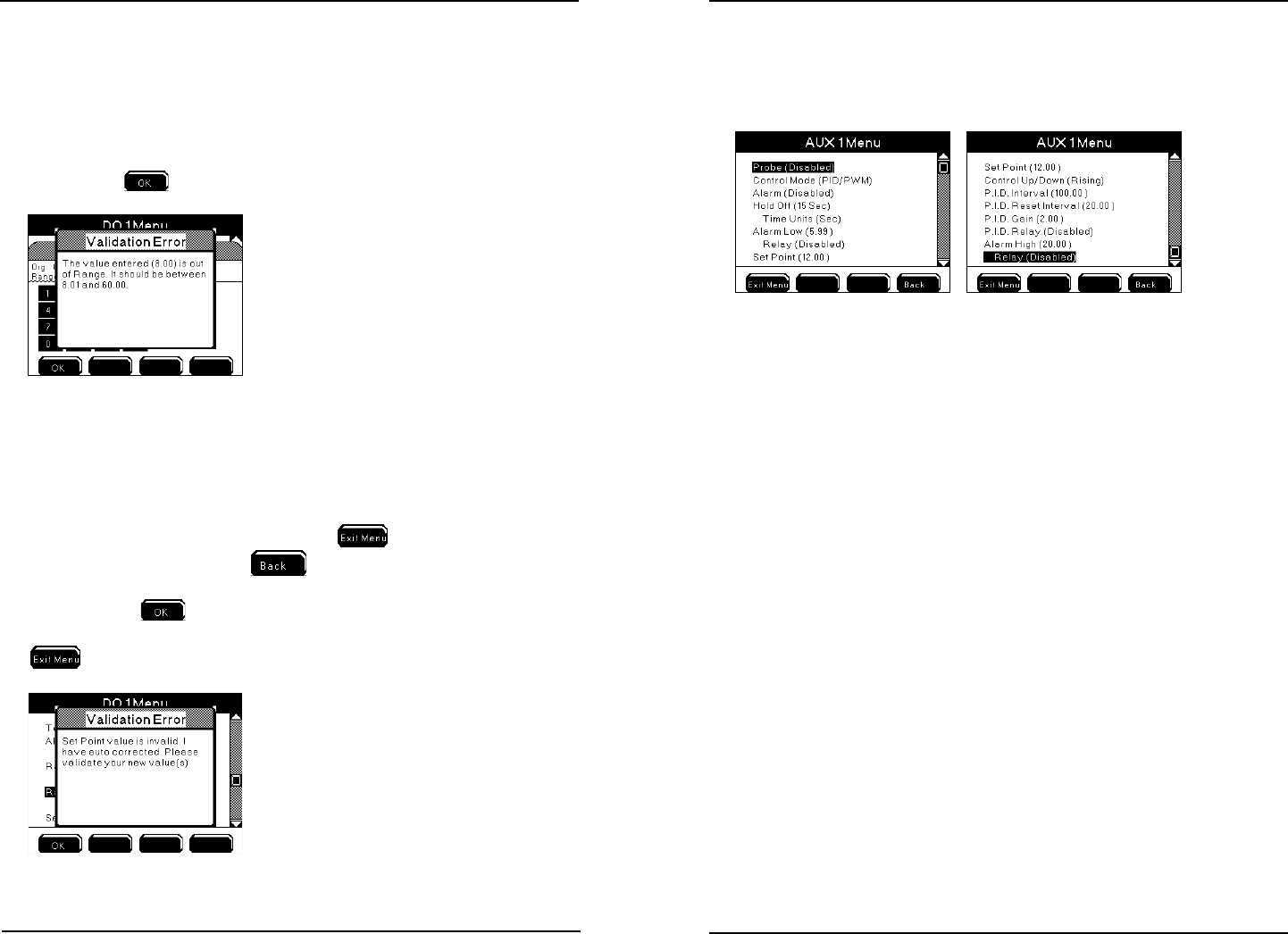
Example - entering “63” for DO set point results in validation error because the
valid range for the DO sensor system is 0.00 to 60.0 mg/l. User must congure
value within valid range. In addition, the value cannot breach respective control
and alarm system values.
Example - conguring set point value of 8.00 mg/L with range low value of 8.00
mg/l results in validation error. Valid set point range is displayed at validation error
display. Press
to return to numeric keypad to enter valid value.
Autox occurs when a high or low control value is entered that breaches the set point
value. Autox changes the high or low control value by one least signicant digit
away from the set point value. e set point value is never adjusted.
Example - Entering 8.00 mg/L as the range low value when the set point value is
8.00 mg/L results in an auto x of the control value. e invalid control value is
displayed at the sensor setup menu. Pressing
is not an option aer saving
a value at numeric keypad. Press
from the sensor setup menu to continue
with the autox. A validation error window is displayed to show that the autox has
occurred. Press
to return to sensor setup menu. Verify that the autoxed
values are congured for user’s specic application and recongure as needed. Press
to save conguration and return to Run Screen.
PID (Proportional, Integral, and Derivative)/
PWM (Pulse, Width, Modulation) Control
PID/PWM control menu options are shown below for an aux analog system.
PID/PWM Control uses a complex algothrium in determining the best way to sustain
water system value(s) around a set point. PID/PWM control is a feed back control
system. ree factors determine how PID/PWM control seeks to maintain water
system value(s) around a set point. e three factors are:
-the error (distance) from present measurement of input to set point (present time);:
-the duration of the error (accumulation of past errors)
-the speed at which the value is approaching the set point (predicts future errors) ;
e PID/PWM control system is considered active whenever error exists away from
the congured set point. (See PID/PWM up/down control conguration -page 144)
e PID/PWM control system is exible and can be tuned to keep water systems
around their set points even though the environment is exposed to disturbances
that drive the input value away from set point. An example of a PID/PWM control
system that most readers will be familiar with is a cruise control system in a car. Ac-
celeration and deacceleration adjustments are continually being made to maintain
the car at a constant speed or set point.
Congure PID/PDW control systems at Sensor Setup menus.
PID/PWM control also allows conguration of high and low alarm systems to
activate peripheral devices and/or to provide alarm notication messages when
alarm condition(s) exist.
Notes:
- Changing control method between PID/PWM and Set Point may result in
invalid setp point, control and alarm value congurations. Always reconrm
sensor setup system menu conguration when control mode is changed.
- PID/PWM control is not available for aux digital systems.
- DO system(s) PID/PWM set point can be congured using either mg/L or
%Sat set point.
Conguring the 5X00
Conguring the 5X00