
Instruction Manual





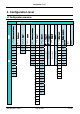




Configuration level
9499-040-93811 / 59537-1 Page 28 of 88 Pro-16
2 / Y / Off, or 2-point controller with partial/full load switch-
over
3 2 x PID (3-point and continuous)
4 3-point stepping controller
mAn
Manual operation permitted 0
0 no
1 yes (see also
LOGI
/
mA
n)
C.Act
Method of controller operation 0
0 inverse, e.g. heatingWith decreasing process value, the
correcting variable is increased, with increasing process
value, the correcting variable is reduced.
1 direct, e.g. coolingWith increasing process value, the
correcting variable is increased, with decreasing process
value, the correcting variable is decreased
FAIL Behaviour at sensor break 1
0 controller outputs switched off
1 y = Y2
2 y = mean output. In the event of a failure of the input signal,
the mean value of the correcting variable output last is
kept.The maximum permissible output can be adjusted with
parameter
Ym.H. To prevent determination of inadmissible
values, mean value formation is only if the control deviation is
lower than parameter
L
.
Y
m.
3 y = mean output; manual adjustment is possible.In the event of
a failure of the input signal, the mean value of the correcting
variable output last is kept.The maximum permissible output
can be adjusted using parameter Ym.H . The mean output is
measured at intervals of 1 min., when the control deviation is
smaller than parameter
L
.
Y
m.
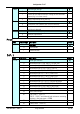
rnG.L
-1999...9999
X0 (lower limit of control range ) indicates the smallest value
to be expected as process value.
-100
rnG.H
-1999...9999
X100 (high limit range of control) indicates the highest value
to be expected as process value.
1200
SP2C With active SP.2 no cooling controlling is provided 0
0 standard (cooling permissible with all set-points)
1 no cooling provided with active SP.2
CYCL Characteristic for 2-point- and 3-point-controllers 0
0 Standard (see page 42)
1 water cooling linear (see page 43)
2 water cooling non-linear (see page 44)
3 with constant cycle (see page 45)