
User guide










APPENDIX 111
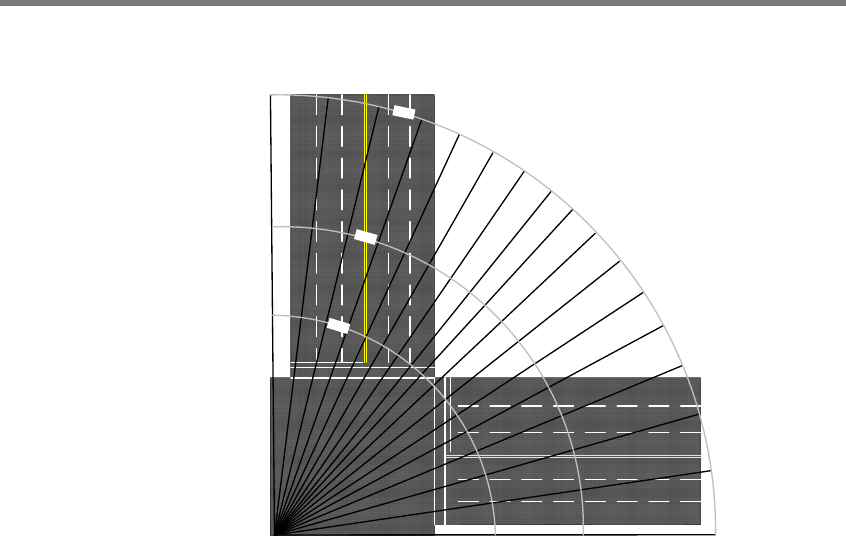
200
ft
140
ft
100
ft
Figure E.2 – Dual Approach Monitoring
Signal-to-Noise Ratio and the Stop bar Eect
e SmartSensor Matrix collects data beyond its advertised range. However, the signal-to-
noise ratio, or the signal-to-clutter ratio, is not large enough at the far ranges to consistently
detect a vehicle. is means that even though the sensor does detect some energy, the UI
doesn’t show constrained trackers.
is will normally not aect sensor performance for stop bar applications when the sensor
detects a stopped vehicle. However, the sensor does not allow new stopped trackers to be
created within a certain distance of the stop bar unless it has been detected for approxi-
mately 15 seconds. is feature allows the sensor to prevent slow moving objects, such as
pedestrians, bicycles and cars cutting the corner, from creating false detections. is is what
is referred to as the "stop bar eect."
Occlusion
Occlusion becomes a bigger problem the farther the range. In the intersection, it is compli-
cated by the fact that the vehicles can be stopped in a long queue, for example in a le hand
turn lane, and the sensor may never see a vehicle passing in a farther lane.
If the range to the sensor of an object is doubled, then the amount of ground range that can
be occluded by on object is also doubled.