
Application Notes





Table Of Contents
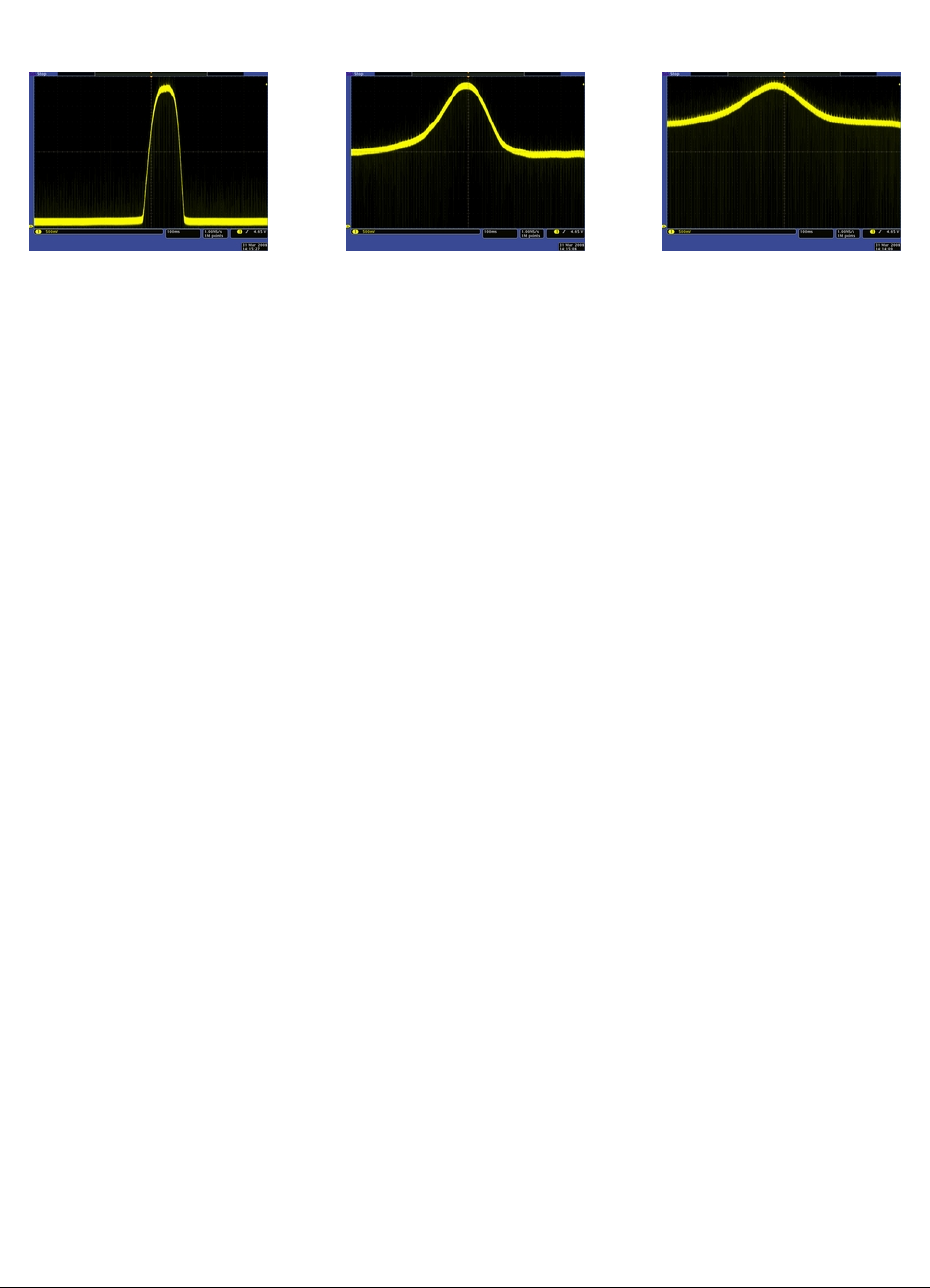
between the three captures is the distance from the sensor to the disk: ~1/8" in the first capture, ~1/4" in the second
capture, and ~3/8" in the third capture.
QTR-1A output 1/8" away from a spinning
white disk with a black line on it.
QTR-1A output 1/4" away from a spinning
white disk with a black line on it.
QTR-1A output 3/8" away from a spinning
white disk with a black line on it.
As the distance between the sensor and the surface increases, the overall reflectance decreases and the total range of
the sensor output decreases. At a distance of 1/8", the difference between the white surface and the black surface is
around 4.5 V. At a distance of 3/8", the difference between the white surface and the black surface has decreased to
around 1.2 V, which makes distinguishing between the two surfaces much harder and much more prone to error
caused by noise or changes in lighting conditions.
Note that in these captures you can clearly see the effect of the motor’s noise on the output signal. This underscores
the importance of filtering your sensor output if it will be in a potentially noisy environment, either by using a low-
pass filter circuit or by averaging several sensor readings together.
Pololu QTR Reflectance Sensor Application Note © 2001–2009 Pololu Corporation
2. QTR-xA Sensor Output (Analog Voltages) Page 5 of 5