
User Manual










Table Of Contents
- 1 Features
- 2 First Steps with TMCL
- 3 TMCL and the TMCL-IDE — An Introduction
- 3.1 Binary Command Format
- 3.2 Reply Format
- 3.3 Standalone Applications
- 3.4 TMCL Command Overview
- 3.5 TMCL Commands by Subject
- 3.6 Detailed TMCL Command Descriptions
- 3.6.1 ROR (Rotate Right)
- 3.6.2 ROL (Rotate Left)
- 3.6.3 MST (Motor Stop)
- 3.6.4 MVP (Move to Position)
- 3.6.5 SAP (Set Axis Parameter)
- 3.6.6 GAP (Get Axis Parameter)
- 3.6.7 SGP (Set Global Parameter)
- 3.6.8 GGP (Get Global Parameter)
- 3.6.9 STGP (Store Global Parameter)
- 3.6.10 RSGP (Restore Global Parameter)
- 3.6.11 RFS (Reference Search)
- 3.6.12 SIO (Set Output)
- 3.6.13 GIO (Get Input)
- 3.6.14 CALC (Calculate)
- 3.6.15 COMP (Compare)
- 3.6.16 JC (Jump conditional)
- 3.6.17 JA (Jump always)
- 3.6.18 CSUB (Call Subroutine)
- 3.6.19 RSUB (Return from Subroutine)
- 3.6.20 WAIT (Wait for an Event to occur)
- 3.6.21 STOP (Stop TMCL Program Execution – End of TMCL Program)
- 3.6.22 SCO (Set Coordinate)
- 3.6.23 GCO (Get Coordinate)
- 3.6.24 CCO (Capture Coordinate)
- 3.6.25 ACO (Accu to Coordinate)
- 3.6.26 CALCX (Calculate using the X Register)
- 3.6.27 AAP (Accu to Axis Parameter)
- 3.6.28 AGP (Accu to Global Parameter)
- 3.6.29 CLE (Clear Error Flags)
- 3.6.30 EI (Enable Interrupt)
- 3.6.31 DI (Disable Interrupt)
- 3.6.32 VECT (Define Interrupt Vector)
- 3.6.33 RETI (Return from Interrupt)
- 3.6.34 Customer specific Command Extensions (UF0…UF7 – User Functions)
- 3.6.35 Request Target Position reached Event
- 3.6.36 TMCL Control Commands
- 4 Axis Parameters
- 5 Global Parameters
- 6 Hints and Tips
- 7 TMCL Programming Techniques and Structure
- 8 Figures Index
- 9 Tables Index
- 10 Supplemental Directives
- 11 Revision History
TMCM-3212 TMCL
™
Firmware Manual • Firmware Version V1.07 | Document Revision V1.04 • 2017-JUN-08
83 / 103
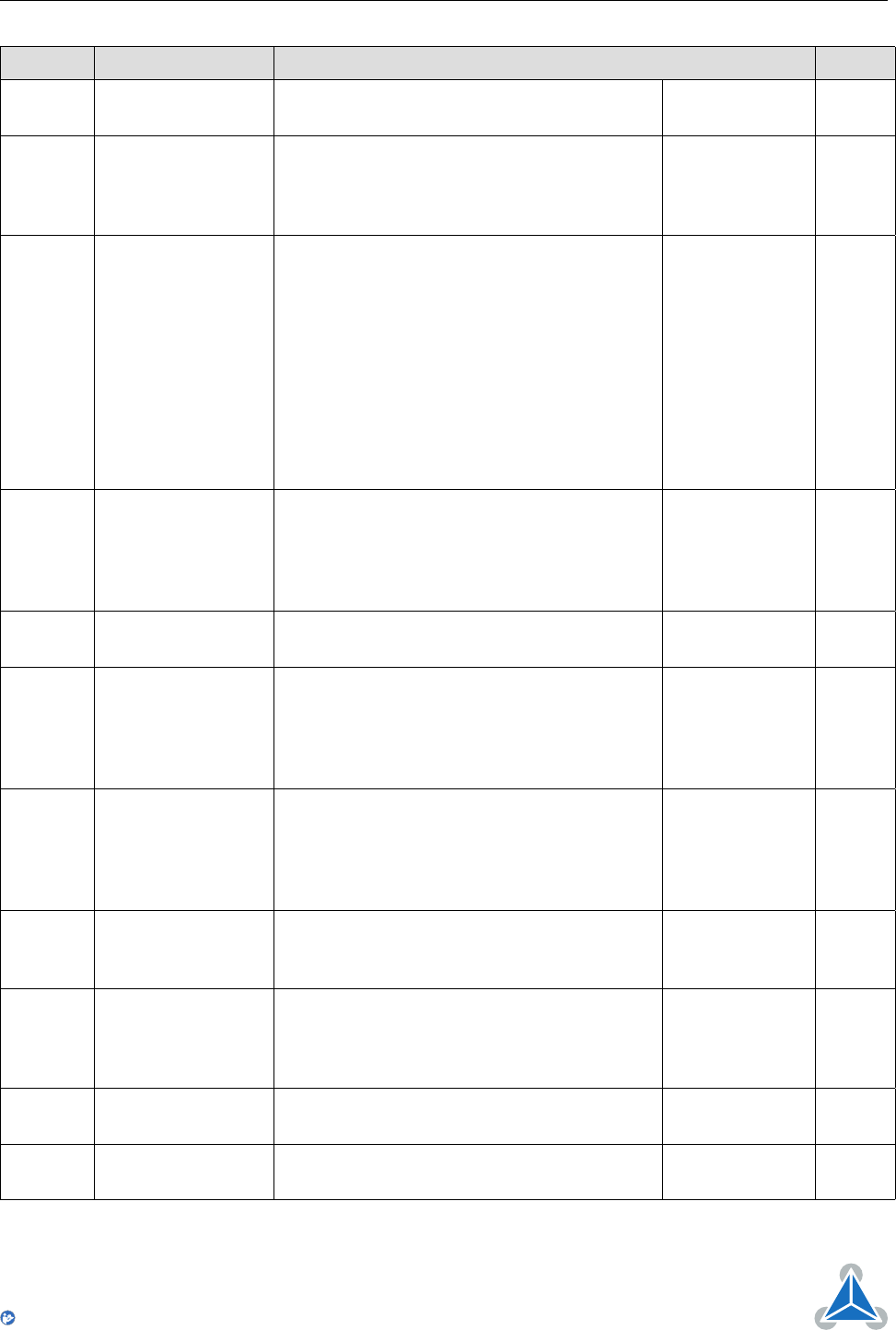
Number Global Parameter Description Range [Units] Access
76 Serial host
address
Host address used in the reply telegrams
sent back via RS485.
0. . . 255 RWA
77 Auto start mode
0 - Do not start TMCL application after
power up (default).
1 - Start TMCL application automatically af-
ter power up.
0/1 RWA
81 TMCL code
protection
Protect a TMCL program against disassem-
bling or overwriting.
0 - no protection
1 - protection against disassembling
2 - protection against overwriting
3 - protection against disassembling and
overwriting
When switching off the protection
against disassembling (changing this
parameter from 1 or 3 to 0 or 2, the
program will be erased first!
0/1/2/3 RWA
82 CAN heartbeat
Heartbeat for CAN interface. If this time
limit is up and no further command is re-
ceived the motor will be stopped. Setting
this parameter to 0 (default) turns off the
CAN heartbeat function.
0. . . 65535 RWA
83 CAN secondary
address
Second CAN ID for the module. Switched
off when set to zero.
0. . . 2047 RWA
84 Coordinate
storage
0 - coordinates are stored in RAM only (but
can be copied explicitly between RAM and
EEPROM)
1 - coordinates are always also stored in the
EEPROM
0/1 RWA
85 Do not restore
user variables
Determines if TMCL user variables are to be
restored from the EEPROM automatically on
startup.
0 - user variables are restored (default)
1 - user variables are not restored
0/1 RWA
87 Serial secondary
address
Second module (target) address for RS485.
Setting this parameter to 0 switches off the
seconndary address.
0. . . 255 RWA
128 TMCL application
status
0 - stop
1 - run
2 - step
3 - reset
0. . . 3 R
129 Download mode 0 - normal mode
1 - download mode
0/1 R
130 TMCL program
counter
Contains the address of the currently exe-
cuted TMCL command.
R
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.