
User Manual










Table Of Contents
- 1 Features
- 2 Order Codes
- 3 Mechanical and Electrical Interfacing
- 4 Connectors
- 5 Jumper Settings
- 6 LEDs
- 7 Communication
- 8 Functional Description
- 9 Operational Ratings and Characteristics
- 10 Abbreviations used in this Manual
- 11 Figures Index
- 12 Tables Index
- 13 Supplemental Directives
- 14 Revision History
TMCM-1110 Hardware Manual • Hardware Version V2.30 | Document Revision V1.10 • 2017-SEP-06
19 / 26
8.1 Extensions of the TMCM-1110 stepRocker
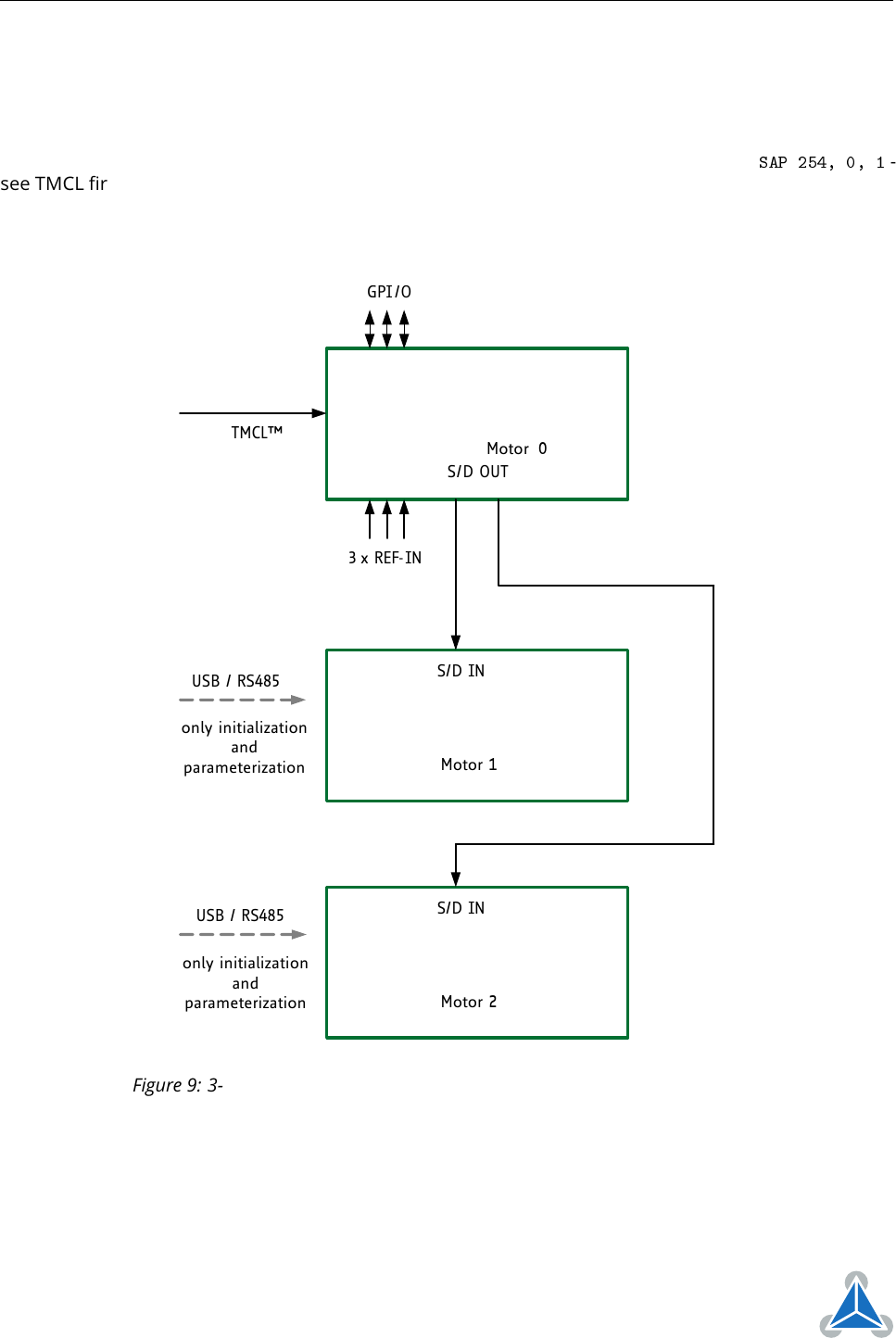
The TMCM-1110_V23 stepRocker can be extended for multi-axes systems with up-to 3 axes. The stepRocker
itself can be configured as master or slave. An example for a three axes system is shown below. The
stepRocker at the top is configured as master while the other two are configured as slave. In addition
to jumper setting it is necessary to switch both slave controller to driver-only operation (
SAP 254, 0, 1
-
see TMCL firmware manual, also). Only the motion controller on the master will be used. Therefore, all
motion control related commands have to be issued to the master. In contrast, driver related commands
(e.g. current settings, microstep resolution) have to be issued to each board separately (or stored on each
board as TMCL program).
USB
Master / Motor 0
Motor 1
Motor 2
S/D OUT
S/D IN
S/D IN
3 x REF- IN
GPI /O
USB / RS485
only initialization
and
parameterization
TMCL™
only initialization
and
parameterization
USB / RS485
Figure 9: 3-Axes System using three stepRockers in Master/Slave Configuration
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com