
User Manual










Table Of Contents
- 1 Features
- 2 Order Codes
- 3 Mechanical and Electrical Interfacing
- 4 Connectors
- 5 Jumper Settings
- 6 LEDs
- 7 Communication
- 8 Functional Description
- 9 Operational Ratings and Characteristics
- 10 Abbreviations used in this Manual
- 11 Figures Index
- 12 Tables Index
- 13 Supplemental Directives
- 14 Revision History
TMCM-1110 Hardware Manual • Hardware Version V2.30 | Document Revision V1.10 • 2017-SEP-06
11 / 26
Pin Label Direction Description
3 D+ bi-directional USB Data+
4 ID Connected to signal and system ground
5 GND Power (GND) Signal and system ground
Table 8: USB Connector Pin Assignment
4.7 Step/Dir Input Connector (Motor 0)
The TMCM-1110 stepRocker is equipped with a step/dir input connector for motor 0. Via this connector an
external motion controller can be used together with the on-board driver electronics. For selecting an
external motion controller instead of the on-board TMC429 motion controller two jumpers have to be set
(please refer to chapter 5).
Step/Dir Input Connector Pin Assignment
Pin Label Direction Description
1 GND Power (GND) Signal and System ground
2 Step In in Driver step input signal (+5V compatible)
3 Dir In in Driver direction input signal (+5V compatible)
Table 9: Step/Dir Input Connector Pin Assignment
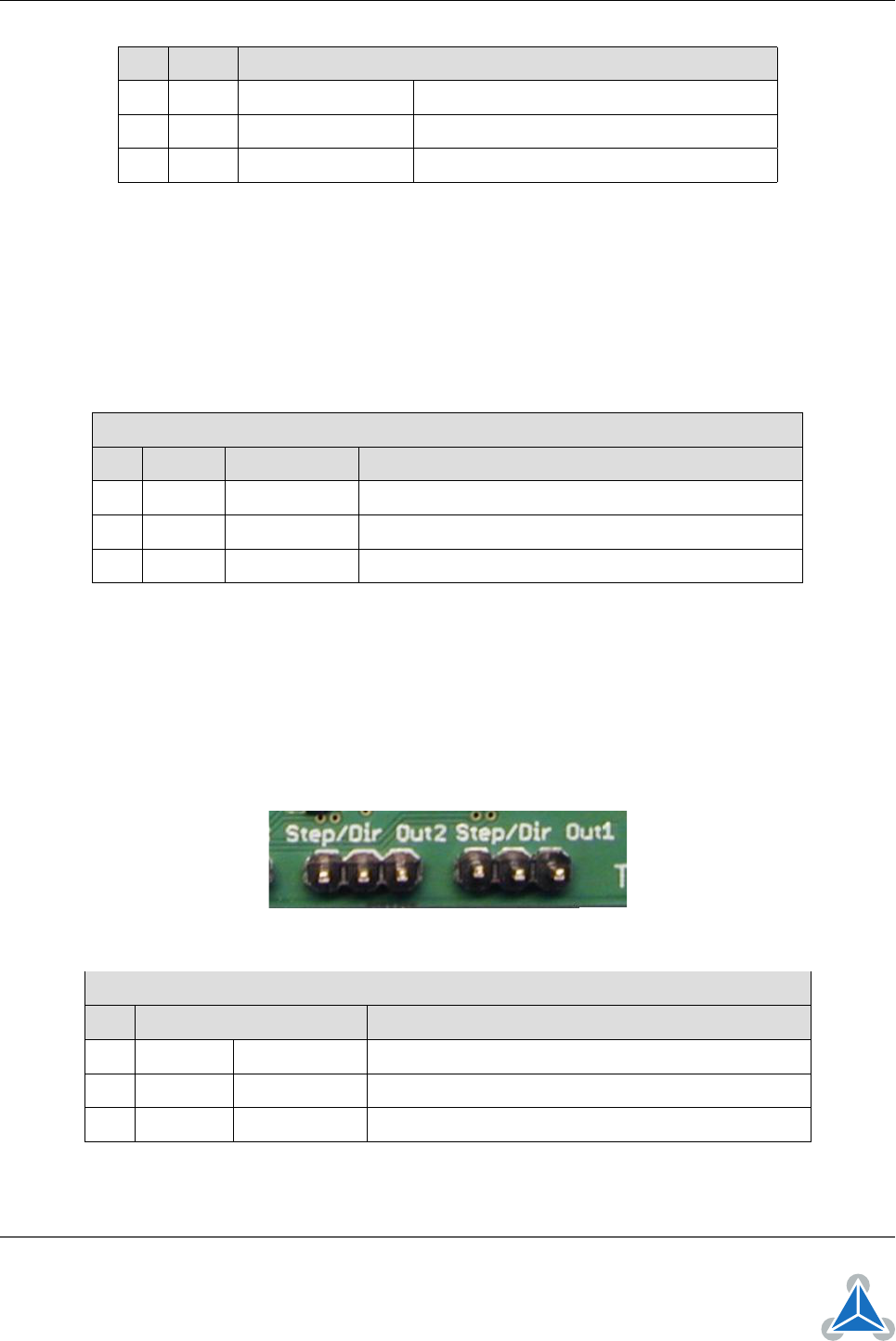
4.8 Step/Dir Output Connectors (Motor 1 and Motor 2)
The TMC429 motion controller on the stepRocker is able to control up to three stepper motors. Its Step/Dir
outputs (TTL level) for motor 1 and motor 2 are available via connectors Step/Dir Out 1 and Step/Dir Out 2.
The TMCM-1110 stepRocker can be extended to a complete motion controller/driver system for all three
motors.
Step/Dir Output Connector Pin Assignment
Pin Label Direction Description
1 GND Power (GND) Signal and System ground
2 Step Out out Driver step output signal (+5V compatible)
3 Dir Out out Driver direction output signal (+5V compatible)
Table 10: Step/Dir Output Connector Pin Assignment
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com