
User Manual










Table Of Contents
- 1 Features
- 2 First Steps with TMCL
- 3 TMCL and the TMCL-IDE — An Introduction
- 3.1 Binary Command Format
- 3.2 Reply Format
- 3.3 Standalone Applications
- 3.4 The ASCII Interface
- 3.5 TMCL Command Overview
- 3.6 TMCL Commands by Subject
- 3.7 Detailed TMCL Command Descriptions
- 3.7.1 ROR (Rotate Right)
- 3.7.2 ROL (Rotate Left)
- 3.7.3 MST (Motor Stop)
- 3.7.4 MVP (Move to Position)
- 3.7.5 SAP (Set Axis Parameter)
- 3.7.6 GAP (Get Axis Parameter)
- 3.7.7 STAP (Store Axis Parameter)
- 3.7.8 RSAP (Restore Axis Parameter)
- 3.7.9 SGP (Set Global Parameter)
- 3.7.10 GGP (Get Global Parameter)
- 3.7.11 STGP (Store Global Parameter)
- 3.7.12 RSGP (Restore Global Parameter)
- 3.7.13 RFS (Reference Search)
- 3.7.14 SIO (Set Output)
- 3.7.15 GIO (Get Input)
- 3.7.16 CALC (Calculate)
- 3.7.17 COMP (Compare)
- 3.7.18 JC (Jump conditional)
- 3.7.19 JA (Jump always)
- 3.7.20 CSUB (Call Subroutine)
- 3.7.21 RSUB (Return from Subroutine)
- 3.7.22 WAIT (Wait for an Event to occur)
- 3.7.23 STOP (Stop TMCL Program Execution – End of TMCL Program)
- 3.7.24 SCO (Set Coordinate)
- 3.7.25 GCO (Get Coordinate)
- 3.7.26 CCO (Capture Coordinate)
- 3.7.27 ACO (Accu to Coordinate)
- 3.7.28 CALCX (Calculate using the X Register)
- 3.7.29 AAP (Accu to Axis Parameter)
- 3.7.30 AGP (Accu to Global Parameter)
- 3.7.31 CLE (Clear Error Flags)
- 3.7.32 EI (Enable Interrupt)
- 3.7.33 DI (Disable Interrupt)
- 3.7.34 VECT (Define Interrupt Vector)
- 3.7.35 RETI (Return from Interrupt)
- 3.7.36 Customer specific Command Extensions (UF0…UF7 – User Functions)
- 3.7.37 Request Target Position reached Event
- 3.7.38 TMCL Control Commands
- 4 Axis Parameters
- 5 Global Parameters
- 6 Module Specific Hints
- 7 Hints and Tips
- 8 TMCL Programming Techniques and Structure
- 9 Figures Index
- 10 Tables Index
- 11 Supplemental Directives
- 12 Revision History
PD-1160 TMCL
™
Firmware Manual • Firmware Version V1.42 | Document Revision V1.06 • 2018-JAN-09
90 / 113
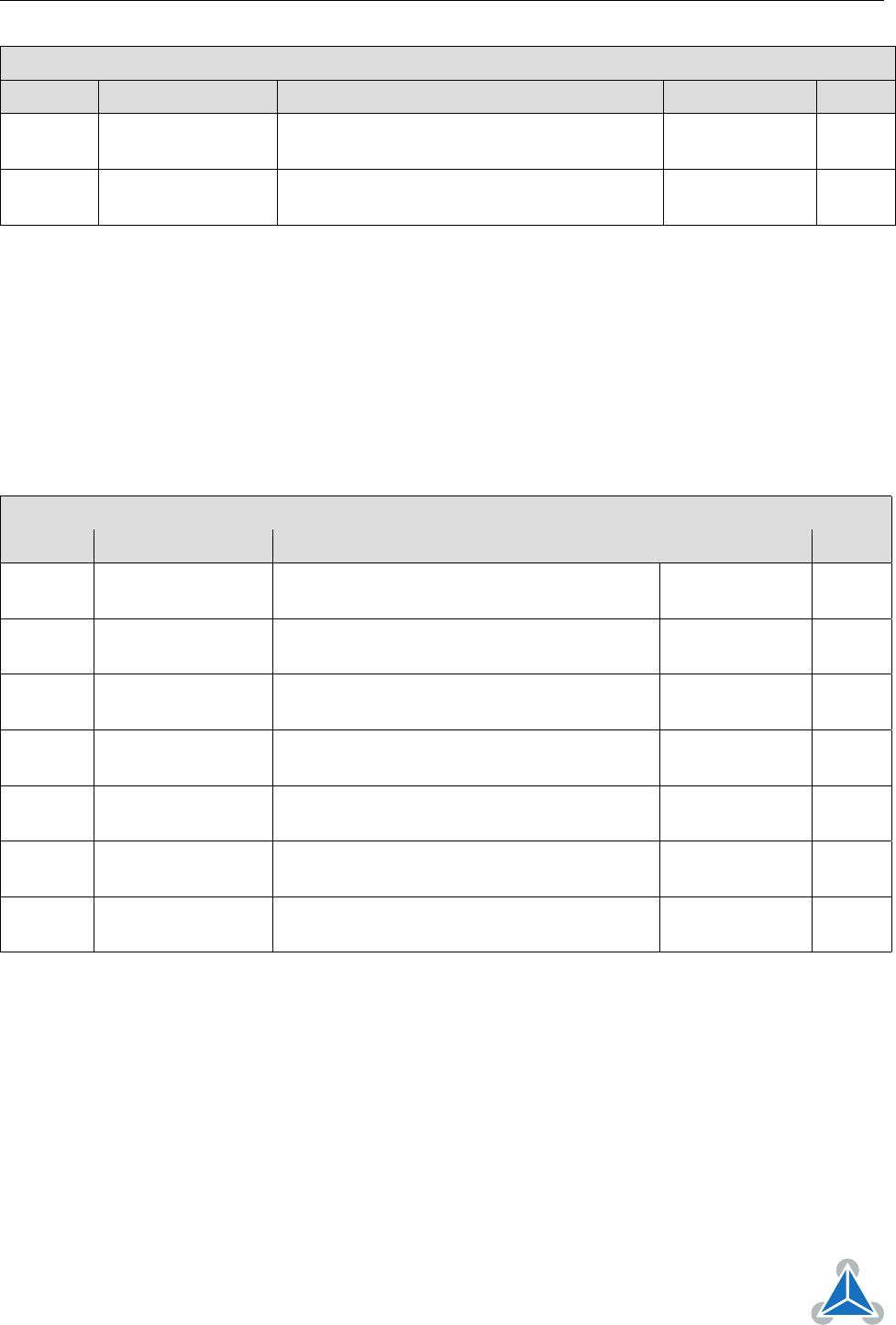
User Variables in Bank 2
Number Global Parameter Description Range [Units] Access
0. . . 55
user variables
#0. . . #55
TMCL user variables
-2147483648 . . .
2147483647
RWE
56. . . 255
user variables
#56. . . #255
TMCL user variables
-2147483648 . . .
2147483647
RWE
Table 18: User Variables in Bank 2
5.4 Bank 3
Bank 3 contains interrupt parameters. Some interrupts need configuration (e.g. the timer interval of
a timer interrupt). This can be done using the SGP commands with parameter bank 3 (SGP <type>, 3,
<value>).
The priority of an interrupt depends on its number. Interrupts with a lower number have
a higher priority.
Table 19 shows all interrupt parameters that can be set. Please see table 16 for an explanation of the
parameter access types.
Interrupt Parameters in Bank 3
Number Global Parameter Description Range [Units] Access
0 Timer 0 period
(ms)
Time between two interrupts
0. . . 4294967295
[ms]
RW
1 Timer 1 period
(ms)
Time between two interrupts
0. . . 4294967295
[ms]
RW
2 Timer 2 period
(ms)
Time between two interrupts
0. . . 4294967295
[ms]
RW
27 Stop left 0 trigger
transition
0=off, 1=low-high, 2=high-low, 3=both 0. . . 3 RW
28
Stop right 0 trigger
transition
0=off, 1=low-high, 2=high-low, 3=both 0. . . 3 RW
39 Input 0 trigger
transition
0=off, 1=low-high, 2=high-low, 3=both 0. . . 3 RW
40 Input 1 trigger
transition
0=off, 1=low-high, 2=high-low, 3=both 0. . . 3 RW
Table 19: Interrupt Parameters in Bank 3
©2018 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com