
User Manual










Table Of Contents
- 1 Features
- 2 First Steps with TMCL
- 3 TMCL and the TMCL-IDE — An Introduction
- 3.1 Binary Command Format
- 3.2 Reply Format
- 3.3 Standalone Applications
- 3.4 The ASCII Interface
- 3.5 TMCL Command Overview
- 3.6 TMCL Commands by Subject
- 3.7 Detailed TMCL Command Descriptions
- 3.7.1 ROR (Rotate Right)
- 3.7.2 ROL (Rotate Left)
- 3.7.3 MST (Motor Stop)
- 3.7.4 MVP (Move to Position)
- 3.7.5 SAP (Set Axis Parameter)
- 3.7.6 GAP (Get Axis Parameter)
- 3.7.7 STAP (Store Axis Parameter)
- 3.7.8 RSAP (Restore Axis Parameter)
- 3.7.9 SGP (Set Global Parameter)
- 3.7.10 GGP (Get Global Parameter)
- 3.7.11 STGP (Store Global Parameter)
- 3.7.12 RSGP (Restore Global Parameter)
- 3.7.13 RFS (Reference Search)
- 3.7.14 SIO (Set Output)
- 3.7.15 GIO (Get Input)
- 3.7.16 CALC (Calculate)
- 3.7.17 COMP (Compare)
- 3.7.18 JC (Jump conditional)
- 3.7.19 JA (Jump always)
- 3.7.20 CSUB (Call Subroutine)
- 3.7.21 RSUB (Return from Subroutine)
- 3.7.22 WAIT (Wait for an Event to occur)
- 3.7.23 STOP (Stop TMCL Program Execution – End of TMCL Program)
- 3.7.24 SCO (Set Coordinate)
- 3.7.25 GCO (Get Coordinate)
- 3.7.26 CCO (Capture Coordinate)
- 3.7.27 ACO (Accu to Coordinate)
- 3.7.28 CALCX (Calculate using the X Register)
- 3.7.29 AAP (Accu to Axis Parameter)
- 3.7.30 AGP (Accu to Global Parameter)
- 3.7.31 CLE (Clear Error Flags)
- 3.7.32 EI (Enable Interrupt)
- 3.7.33 DI (Disable Interrupt)
- 3.7.34 VECT (Define Interrupt Vector)
- 3.7.35 RETI (Return from Interrupt)
- 3.7.36 Customer specific Command Extensions (UF0…UF7 – User Functions)
- 3.7.37 Request Target Position reached Event
- 3.7.38 TMCL Control Commands
- 4 Axis Parameters
- 5 Global Parameters
- 6 Module Specific Hints
- 7 Hints and Tips
- 8 TMCL Programming Techniques and Structure
- 9 Figures Index
- 10 Tables Index
- 11 Supplemental Directives
- 12 Revision History
PD-1160 TMCL
™
Firmware Manual • Firmware Version V1.42 | Document Revision V1.06 • 2018-JAN-09
83 / 113
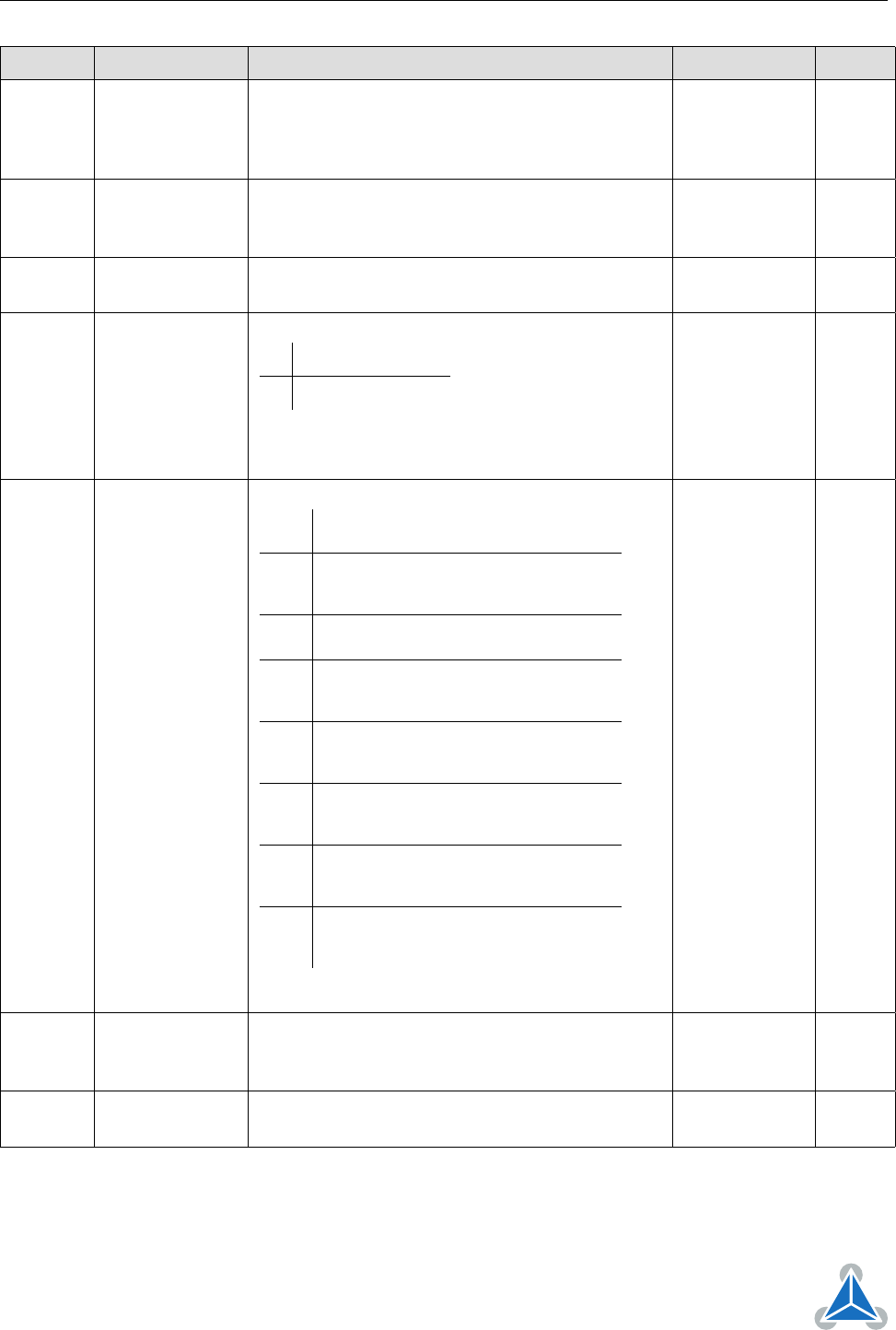
Number Axis Parameter Description Range [Units] Access
200 Boost current
Current used for acceleration and deceleration
phases. If set to 0 the same current as set by
axis parameter #6 will be used. Same scaling as
with axis parameter #6.
0. . . 255 RW
204 Freewheeling
Time after which the power to the motor will be
cut when its velocity has reached zero (a value
of 0 (default setting) means never).
0. . . 65535
[10ms]
RWE
206 Actual load
value
Readout of the actual load value used for stall
detection (stallGuard2).
0. . . 1023 R
207 Extended error
flags
A combination of the following values:
1 stallGuard error
2 deviation error
These error flags are cleared automatically
when this parameter has been read out or when
a motion command has been executed.
0. . . 3 R
208 TMC262 error
flags
A combination of the following values:
Bit 0 stallGuard2 status
(1: threshold reached)
Bit 1 Overtemperature
(1: driver is shut down due to overtemper-
ature)
Bit 2 Overtemperature pre-warning
(1: temperature threshold is exceeded)
Bit 3 Short to ground A
(1: short condition detected, driver cur-
rently shut down)
Bit 4 Short to ground B
(1: short condition detected, driver cur-
rently shut down)
Bit 5 Open load A
(1: no chopper event has happened during
the last period with constant coil polarity)
Bit 6 Open load B
(1: no chopper event has happened during
the last period with constant coil polarity)
Bit 7 Stand still
(1: no step impulse occurred on the step
input during the last 2
20
clock cycles)
Please also refer to the TMC262 Datasheet for more
information.
0. . . 255 R
209 Encoder
position
Encoder counter value. -2147483648
. . . 2147483647
[µsteps]
RW
210 Encoder
prescaler
Prescaler for the encoder. Please see section
6.2.
See section
6.2
RW
©2018 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com