
User Manual










Table Of Contents
- 1 Features
- 2 First Steps with TMCL
- 3 TMCL and the TMCL-IDE — An Introduction
- 3.1 Binary Command Format
- 3.2 Reply Format
- 3.3 Standalone Applications
- 3.4 The ASCII Interface
- 3.5 TMCL Command Overview
- 3.6 TMCL Commands by Subject
- 3.7 Detailed TMCL Command Descriptions
- 3.7.1 ROR (Rotate Right)
- 3.7.2 ROL (Rotate Left)
- 3.7.3 MST (Motor Stop)
- 3.7.4 MVP (Move to Position)
- 3.7.5 SAP (Set Axis Parameter)
- 3.7.6 GAP (Get Axis Parameter)
- 3.7.7 STAP (Store Axis Parameter)
- 3.7.8 RSAP (Restore Axis Parameter)
- 3.7.9 SGP (Set Global Parameter)
- 3.7.10 GGP (Get Global Parameter)
- 3.7.11 STGP (Store Global Parameter)
- 3.7.12 RSGP (Restore Global Parameter)
- 3.7.13 RFS (Reference Search)
- 3.7.14 SIO (Set Output)
- 3.7.15 GIO (Get Input)
- 3.7.16 CALC (Calculate)
- 3.7.17 COMP (Compare)
- 3.7.18 JC (Jump conditional)
- 3.7.19 JA (Jump always)
- 3.7.20 CSUB (Call Subroutine)
- 3.7.21 RSUB (Return from Subroutine)
- 3.7.22 WAIT (Wait for an Event to occur)
- 3.7.23 STOP (Stop TMCL Program Execution – End of TMCL Program)
- 3.7.24 SCO (Set Coordinate)
- 3.7.25 GCO (Get Coordinate)
- 3.7.26 CCO (Capture Coordinate)
- 3.7.27 ACO (Accu to Coordinate)
- 3.7.28 CALCX (Calculate using the X Register)
- 3.7.29 AAP (Accu to Axis Parameter)
- 3.7.30 AGP (Accu to Global Parameter)
- 3.7.31 CLE (Clear Error Flags)
- 3.7.32 EI (Enable Interrupt)
- 3.7.33 DI (Disable Interrupt)
- 3.7.34 VECT (Define Interrupt Vector)
- 3.7.35 RETI (Return from Interrupt)
- 3.7.36 Customer specific Command Extensions (UF0…UF7 – User Functions)
- 3.7.37 Request Target Position reached Event
- 3.7.38 TMCL Control Commands
- 4 Axis Parameters
- 5 Global Parameters
- 6 Module Specific Hints
- 7 Hints and Tips
- 8 TMCL Programming Techniques and Structure
- 9 Figures Index
- 10 Tables Index
- 11 Supplemental Directives
- 12 Revision History
PD-1160 TMCL
™
Firmware Manual • Firmware Version V1.42 | Document Revision V1.06 • 2018-JAN-09
112 / 113
12 Revision History
12.1 Firmware Revision
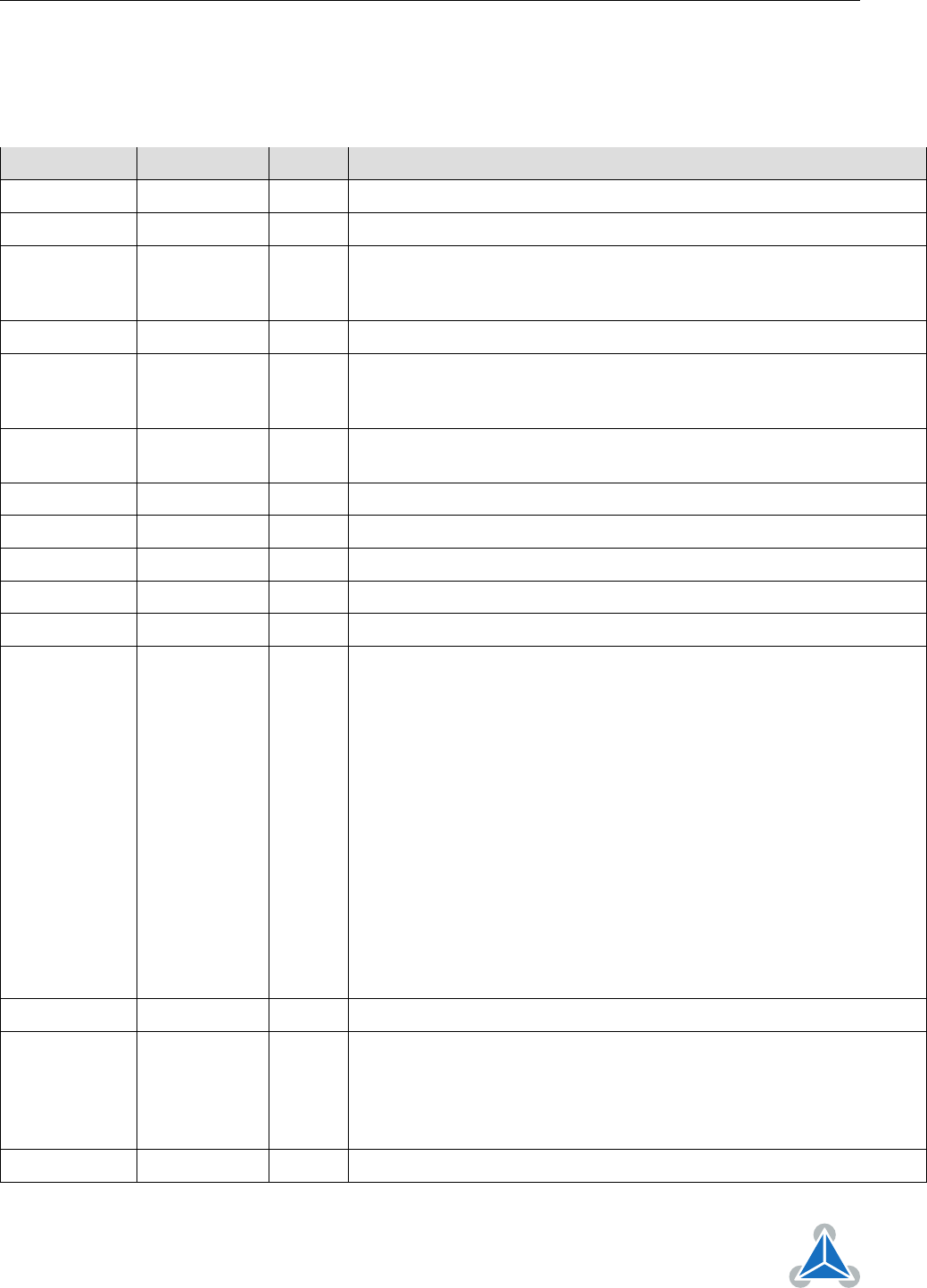
Version Date Author Description
V1.18 2012-MAY-06 OK Release
V1.19 2012-JUL-25 OK Global parameter #79 added
V1.20 2012-OKT-04 OK Global parameter #87 (secondary address for RS232/RS485) added.
Reference search: the last position before setting the counter to zero
can be read out with axis parameter 197.
V1.21 2012-NOV-16 OK Parameter #179 set to 1.
V1.22 2013-JAN-21 OK Maximum read number of encoder increased.
Additional functions of axis parameter 193: reverse home switch
polarity, use right switch instead of left switch.
V1.23 2013-FEB-05 OK
Reference search modese 7 and 8 corrected: end switches are always
deactivated.
V1.24 2013-FEB-20 OK No changes related to the TMCM/PD-1160.
V1.25 2013-AUG-30 OK No changes related to the TMCM/PD-1160.
V1.26 2013-AUG-30 OK No changes related to the TMCM/PD-1160.
V1.27 2013-AUG-30 OK Problem with magnetic encoder fixed.
V1.28. . . V1.34 2014-OCT-10 OK Not deployed.
V1.35 2015-APR-08 OK Slow run current (axis parameter #182) is working correctly now.
RFS STATUS command also copies its result to the accumulator regis-
ter and sets the flags (when used in a TMCL program).
Problem in TMCL interrupt handling that could lead to race condi-
tions fixed.
Version information of the boot loader can be read (if the boot loader
supports this).
Direction of rotation can be reversed using global parameter #90.
The new USB IDs of Trinamic for stepper motor modules are used
(Vendor ID: 2A3C
h
, Product ID: 0100
h
).
Motor will be stopped and cannot be moved when supply voltage
drops below 8.5V. Motor can be moved again when supply voltage is
higher than 9.5V.
TMCL program will be stopped when supply voltage drops below 8.5V
and will be restarted (if autostart mode set) when supply voltage is
getting higher than 9.5V again.
V1.36. . . V1.37 2015-OKT-22 OK Not deployed.
V1.38 2016-MAY-24 OK
Automatic re-calculation of internal ramp parameters also after SAP
153 and SAP 154.
Reference search works more accurate.
Module will be re-initialized when there was no motor supply voltage
on startup.
V1.39. . . V1.41 2016-NOV-28 OK Not deployed.
©2018 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com