
User Manual










Table Of Contents
- 1 Preface
- 2 Communication
- 3 Communication Area
- 3.1 Detailed Object Specifications
- 3.1.1 Object 1000h: Device Type
- 3.1.2 Object 1001h: Error Register
- 3.1.3 Object 1005h: COB-ID SYNC Message
- 3.1.4 Object 1008h: Manufacturer Device Name
- 3.1.5 Object 1009h: Manufacturer Hardware Version
- 3.1.6 Object 100Ah: Manufacturer Software Version
- 3.1.7 Object 100Ch: Guard Time
- 3.1.8 Object 100Dh: Life Time Factor
- 3.1.9 Object 1010h: Store Parameters
- 3.1.10 Object 1011h: Restore Parameters
- 3.1.11 Object 1014h: COB-ID Emergency Object
- 3.1.12 Object 1015h: Inhibit Time EMCY
- 3.1.13 Object 1016h: Consumer Heartbeat Time
- 3.1.14 Object 1017h: Producer Heartbeat Time
- 3.1.15 Object 1018h: Identity Object
- 3.1.16 Object 1029h: Error Behaviour
- 3.1.17 Objects 1400h – 1403h: Receive PDO Communication Parameter
- 3.1.18 Objects 1600h – 1603h: Receive PDO Mapping Parameter
- 3.1.19 Objects 1800h – 1803h: Transmit PDO Communication Parameter
- 3.1.20 Objects 1A00h – 1A03h: Transmit PDO Mapping Parameter
- 3.1 Detailed Object Specifications
- 4 Manufacturer specific Area
- 4.1 Objects related to coolStep
- 4.2 Detailed Object Specifications
- 4.2.1 Object 2000h: Microstep Resolution
- 4.2.2 Object 2001h: Fullstep Resolution
- 4.2.3 Object 2002h: Brake Delay Times
- 4.2.4 Object 2003h: Maximum Current
- 4.2.5 Object 2004h: Standby Current
- 4.2.6 Object 2005h: Limit Switches
- 4.2.7 Object 200Ah: Enable Drive Delay Time
- 4.2.8 Object 200Bh: Encoder Parameters
- 4.2.9 Object 200Ch: Brake Current Feed
- 4.2.10 Object 2010h: Profile Start Velocity
- 4.2.11 Object 2011h: Profile A1
- 4.2.12 Object 2012h: Profile V1
- 4.2.13 Object 2013h: Profile D1
- 4.2.14 Object 2015h: Ramp Wait Time
- 4.2.15 Object 2089h: Setting Delay
- 4.2.16 Object 208Ch: Velocity Dimension Index
- 4.2.17 Object 208Eh: Acceleration Dimension Index
- 4.2.18 Object 2092h: Chopper Blank Time
- 4.2.19 Object 2093h: Chopper Mode
- 4.2.20 Object 2094h: Chopper Hysteresis Decrement
- 4.2.21 Object 2095h: Chopper Hysteresis End
- 4.2.22 Object 2096h: Chopper Hysteresis Start
- 4.2.23 Object 2097h: Chopper Off Time
- 4.2.24 Object 2098h: Smart Energy Current Minimum
- 4.2.25 Object 2099h: Smart Energy Current Down Step
- 4.2.26 Object 209Ah: Smart Energy Hysteresis
- 4.2.27 Object 209Bh: Smart Energy Current Up Step
- 4.2.28 Object 209Ch: Smart Energy Hysteresis Start
- 4.2.29 Object 209Dh: Smart Energy Filter Enable
- 4.2.30 Object 209Eh: stallGuard2 Threshold
- 4.2.31 Object 20A1h: Short Protection Disable
- 4.2.32 Object 20A4h: Stop on Stall
- 4.2.33 Object 20A5h: Smart Energy Threshold Speed
- 4.2.34 Object 20B0h: PWM Threshold Speed
- 4.2.35 Object 20B1h: PWM Gradient
- 4.2.36 Object 20B2h: PWM Amplitude
- 4.2.37 Object 20B3h: dcStep Minimum Speed
- 4.2.38 Object 20B4h: dcStep Time
- 4.2.39 Object 20B5h: dcStep stallGuard
- 4.2.40 Object 20B6h: Fullstep Threshold Speed
- 4.2.41 Object 20B7h: High Speed Chopper Mode
- 4.2.42 Object 20B8h: High Speed Fullstep Mode
- 4.2.43 Object 20B9h: Power Down Ramp
- 4.2.44 Object 2100h: Home Offset Display
- 4.2.45 Object 2101h: Actual Load Value
- 4.2.46 Object 2102h: Driver Error Flags
- 4.2.47 Object 2107h: Microstep Resolution Display
- 4.2.48 Object 210Bh: Step Counter
- 4.2.49 Object 2121h: PWM Scale Value
- 4.2.50 Object 2122h: Measured Velocity
- 4.2.51 Object 2700h: TMCL Direct Communication
- 4.2.52 Object 2701h: Manufacturer Specific Mode
- 4.2.53 Object 2702h: Device Digital Inputs
- 4.2.54 Object 2703h: Device Digital Outputs
- 4.2.55 Object 2704h: CAN Bit Rate
- 4.2.56 Object 2705h: Node ID
- 4.2.57 Object 2706h: Store
- 4.2.58 Object 2707h: CAN Bit Rate Load
- 4.2.59 Object 2708h: Node ID Load
- 4.2.60 Object 270Eh: Device Analog Inputs
- 4.2.61 Object 2710h: Pull-up Resistors
- 5 Profile specific Area
- 5.1 Detailed Object Specifications
- 5.1.1 Object 605Ah: Quick Stop Option Code
- 5.1.2 Object 605Bh: Shutdown Option Code
- 5.1.3 Object 605Ch: Disable Operation Option Code
- 5.1.4 Object 605Dh: Halt Option Code
- 5.1.5 Object 605Eh: Fault Reaction Option Code
- 5.1.6 Object 6060h: Modes of Operation
- 5.1.7 Object 6061h: Modes of Operation Display
- 5.1.8 Object 606Ah: Sensor Selection Code
- 5.1.9 Object 608Fh: Position Encoder Resolution
- 5.1.10 Object 60FDh: Digital Inputs
- 5.1.11 Object 6502h: Supported Drive Modes
- 5.1 Detailed Object Specifications
- 6 Profile Position Mode
- 6.1 Detailed Object Specifications
- 6.1.1 Object 6040h: Control Word
- 6.1.2 Object 6041h: Status Word
- 6.1.3 Object 6062h: Position Demand Value
- 6.1.4 Object 6063h: Position Actual Internal Value
- 6.1.5 Object 6064h: Position Actual Value
- 6.1.6 Object 6065h: Following Error Window
- 6.1.7 Object 6067h: Position Window
- 6.1.8 Object 6068h: Position Window Time
- 6.1.9 Object 606Ch: Velocity Actual Value
- 6.1.10 Object 607Ah: Target Position
- 6.1.11 Object 607Dh: Software Position Limit
- 6.1.12 Object 6081h: Profile Velocity
- 6.1.13 Object 6082h: End Velocity
- 6.1.14 Object 6083h: Profile Acceleration
- 6.1.15 Object 6084h: Profile Deceleration
- 6.1.16 Object 6085h: Quick Stop Deceleration
- 6.1.17 Object 60F2h: Positioning Option Code
- 6.2 How to move a Motor in pp Mode
- 6.1 Detailed Object Specifications
- 7 Profile Velocity Mode
- 7.1 Detailed Object Specifications
- 7.1.1 Object 6040h: Control Word
- 7.1.2 Object 6041h: Status Word
- 7.1.3 Object 6062h: Position Demand Value
- 7.1.4 Object 6063h: Position Actual Internal Value
- 7.1.5 Object 6064h: Position Actual Value
- 7.1.6 Object 6065h: Following Error Window
- 7.1.7 Object 606Ch: Velocity Actual Value
- 7.1.8 Object 607Dh: Software Position Limit
- 7.1.9 Object 6083h: Profile Acceleration
- 7.1.10 Object 6085h: Quick Stop Deceleration
- 7.1.11 Object 60FFh: Target Velocity
- 7.2 How to move a Motor in pv Mode
- 7.1 Detailed Object Specifications
- 8 Homing Mode
- 8.1 Homing Methods
- 8.1.1 Homing Method 1: Homing on negative Limit Switch and Index Pulse
- 8.1.2 Homing Method 2: Homing on positive Limit Switch and Index Pulse
- 8.1.3 Homing Method 3: Homing on positive Home Switch and Index Pulse
- 8.1.4 Homing Method 5: Homing on negative Home Switch and Index Pulse
- 8.1.5 Homing Method 17, 18, 19, and 21: Homing without Index Pulse
- 8.1.6 Homing Method 33 and 34: Homing on next Index Pulse
- 8.1.7 Homing Method 35: Current Position as Home Position
- 8.2 Detailed Object Specifications
- 8.3 How to start a Homing in hm Mode
- 8.1 Homing Methods
- 9 Cyclic synchonous Position Mode
- 9.1 Detailed Object Specifications
- 9.1.1 Object 6040h: Control Word
- 9.1.2 Object 6041h: Status Word
- 9.1.3 Object 6062h: Position Demand Value
- 9.1.4 Object 6063h: Position Actual Internal Value
- 9.1.5 Object 6064h: Position Actual Value
- 9.1.6 Object 606Ch: Velocity Actual Value
- 9.1.7 Object 607Ah: Target Position
- 9.1.8 Object 607Dh: Software Position Limit
- 9.1.9 Object 60B0h: Position Offset
- 9.1.10 Object 60C2h: Interpolation Time Period
- 9.1 Detailed Object Specifications
- 10 Emergency Messages (EMCY)
- 11 Figures Index
- 12 Tables Index
- 13 Supplemental Directives
- 14 Revision History
PD42-1241 CANopen
®
Firmware Manual • Firmware Version V3.21 | Document Revision V1.00 • 2018-MAY-03
13 / 117
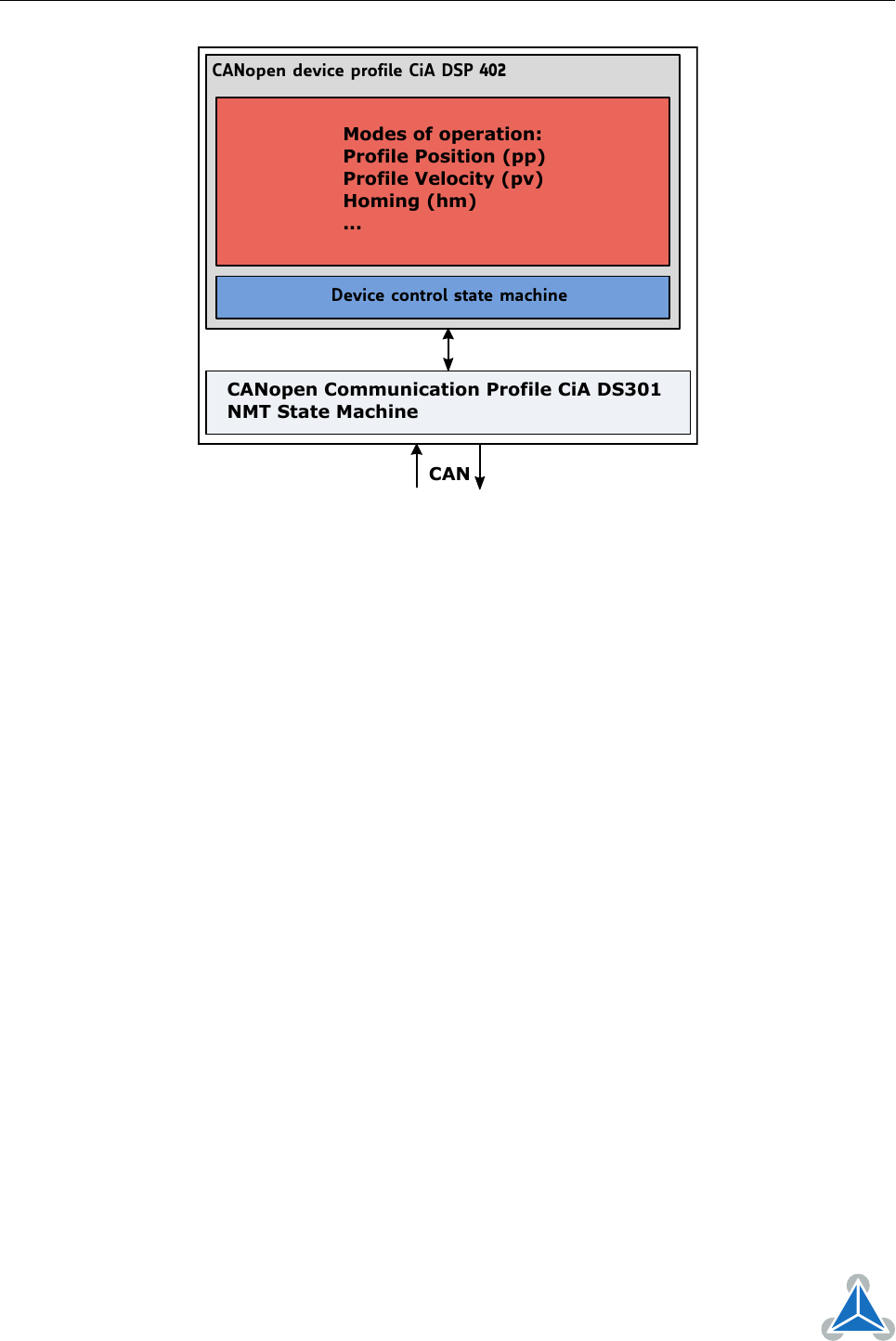
Device control state machine
CANopen Communication Profile CiA DS301
NMT State Machine
Modes of operation:
Profile Position (pp)
Profile Velocity (pv)
Homing (hm)
...
CANopen device profile CiA DSP 402
CAN
Figure 4: Communication Architecture
2.3 Device Model
A CANopen device mainly consists of the following parts:
•
Communication: This function unit provides the communication objects and the appropriate function-
ality to transport data items via the underlying network structure.
•
Object dictionary: The object dictionary is a collection of all the data items which have an influence on
the behavior of the application objects, the communication objects and the state machine used on
this device.
•
Application: The application comprises the functionality of the device with respect to the interaction
with the process environment.
©2018 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com