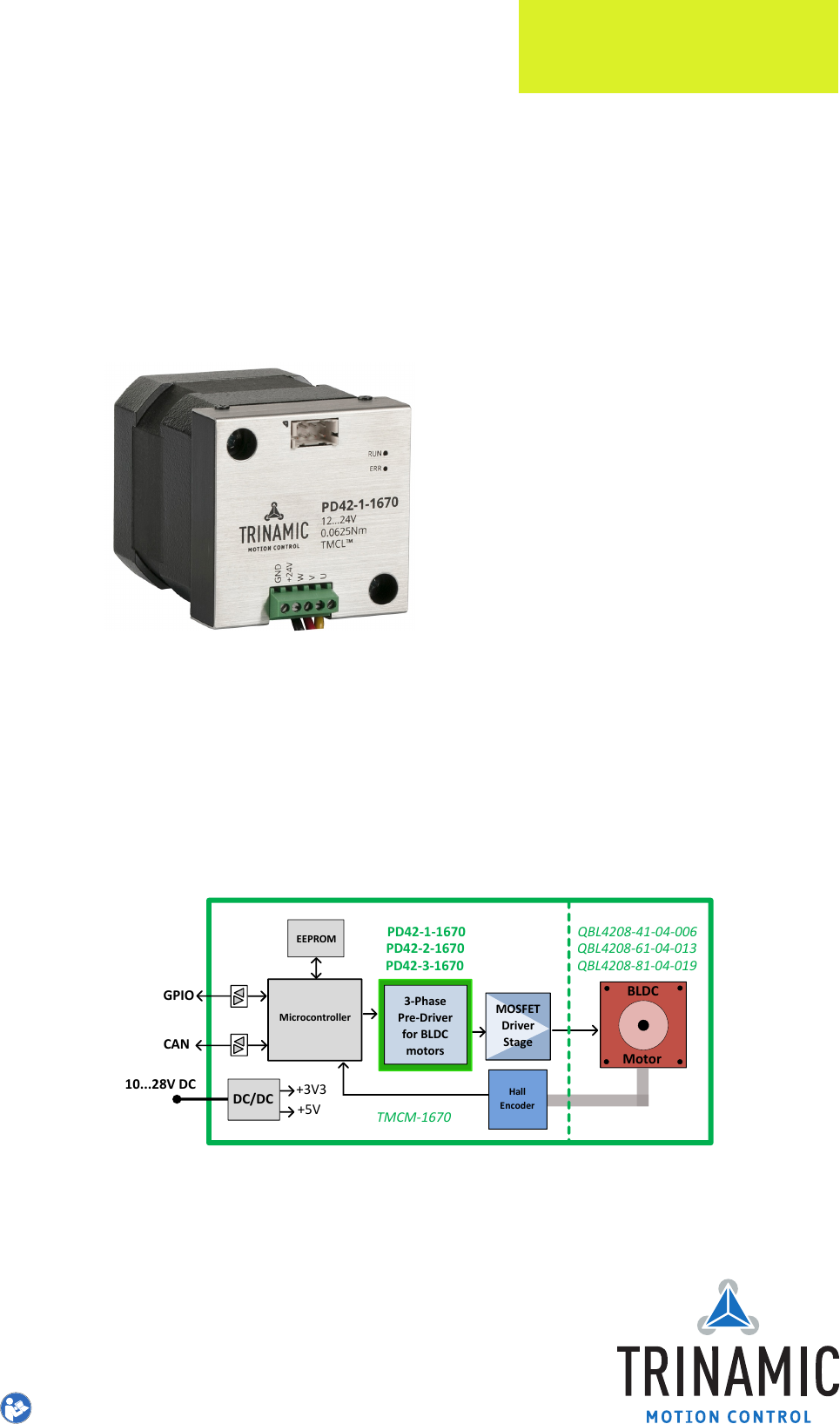
PANDRIVE™ PANdrive™ for BLDC/PMSM PD42-x-1670 CANopen Firmware Manual Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 PD42-x-1670 is an easy to use and rather compact PANdrive™ smart BLDC motor. The module is controlled via CAN bus interface and comes with two firmware options – TMCL and CANopen. The PD42-x-1670 line offer an integrated hall sensor based encoder for closed-loop FOC based operation.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Contents 1 Preface 1.1 General Features of this CANopen Implementation . . . . . . . . . . . . . . . . . . . . . . . . . 1.2 Abbreviations used in this Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.3 Firmware Update . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 Communication 2.1 Reference Model . 2.2 NMT State Machine 2.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 4.1.17 4.1.18 4.1.19 4.1.20 Object 2704h : Object 2705h : Object 2706h : Object 270Eh : CAN Bit Rate . Node ID . . . . User Variables Analog Inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 8 Homing mode 8.1 Homing Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.1.1 Homing Method 17 and 18: Homing without Index Pulse 8.1.2 Homing Method 35: Current Position as Home Position . 8.2 Detailed Object Specifications . . . . . . . . . . . . . . . . . . . . . 8.2.1 Object 6040h : Control Word . . . . . . . . . . . . . . . . . . 8.2.2 Object 6041h : Status Word . . . . . . . . .
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 1 5 / 86 Preface This document specifies objects and modes of operation of the Trinamic PD42-x-1670 BLDC/PMSM motor control module with CANopen firmware. The CANopen firmware is designed to fulfill the CANopen DS402 and DS301 standards. This manual assumes that the reader is already familiar with the basics of the CANopen protocol, defined by the DS301 and DS402 standards of the CAN-CiA.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Further Characteristics • SYNC: consumer (TPDOs 3 are synchronous PDOs) • Emergency: producer • RTR: supported only for node guarding/life guarding • Heartbeat: consumer and producer ©2018 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany Terms of delivery and rights to technical change reserved. Download newest version at www.trinamic.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 2 2.1 8 / 86 Communication Reference Model The application layer comprises a concept to configure and communicate real-time-data as well as the mechanisms for synchronization between devices. The functionality which the application layer offers to an application is logically divided over different service data objects (SDO) in the application layer.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 9 / 86 Service Types Type Definition Local service Involves only the local service object. The application issues a request to its local service object that executes the requested service without communicating with peer service object(s). Unconfirmed service Involves one or more peer service objects. The application issues a request to its local service object.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 2.2 10 / 86 NMT State Machine The finite state machine (FSM) or simply state machine is a model of behavior composed of a finite number of states, transitions between those states, and actions. It shows which way the logic runs when certain conditions are met. Starting and resetting the device is controlled via the state machine. The NMT state machine consists of the states shown in figure 1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 11 / 86 CANopen device profile CiA DSP 402 Modes of operation: Profile Position (pp) Profile Velocity (pv) Homing (hm) ... Device control state machine CANopen Communication Profile CiA DS301 NMT State Machine CAN Figure 2: Communication Architecture 2.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 12 / 86 Application Communication Object dictionary State machine Application object Entry 1 Entry 2 Communication object Communication object Application object Communication object Application object Entry n Application object Communication object Bus system Process Figure 3: Device Model 2.4 Object Dictionary The most important part of a device profile is the object dictionary description.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 13 / 86 The communication profile area at indices 1000h through 1FFFh contains the communication specific parameters for the CAN network. These entries are common to all devices. The manufacturer segment at indices 2000h through 5FFFh contains manufacturer specific objects. These objects control the special features of the Trinamic PD42-x-1670 motion control device.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 14 / 86 Entry Description Sub-index Access PDO Mapping Value Range Default Value 0 ro no UNSIGNED8 0 Table 8: Entry Description (1001h ) Error Register Bits Bit Definition 0 Generic error 1 Current 2 Voltage 3 Temperature 4 Communication error 5 Device profile specific 6 Reserved (always 0) 7 Manufacturer specific Table 9: Error Register Bits 3.1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Entry Description Sub-index Access PDO Mapping Value Range Default Value 0 rw no UNSIGNED32 80h Table 12: Entry Description (1005h ) 3.1.4 Object 1008h : Manufacturer Device Name This object contains the name of the device as given by the manufacturer.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 16 / 86 Object Description Index Name Object Type Data Type 100Ah Manufacturer Software Version Variable Visible String Table 17: Object Description (100Ah ) Entry Description Sub-index Access PDO Mapping Value Range Default Value 0 ro no — Depends on device, e.g. 1.0. Table 18: Entry Description (100Ah ) 3.1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 17 / 86 Entry Description Sub-index Access PDO Mapping Value Range Default Value 0 rw no UNSIGNED8 0 Table 22: Entry Description (100Dh ) 3.1.9 Object 1010h : Store Parameters This object supports the saving of parameters in non volatile memory. By read access the device provides information about its saving capabilities.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 18 / 86 Entry Description Sub-index Description Access PDO Mapping Value Range Default Value 01h Save all parameters rw no UNSIGNED32 — 02h Save communication parameters rw no UNSIGNED32 — 03h Save device profile parameters rw no UNSIGNED32 — 04h Save motor axis 0 parameters rw no UNSIGNED32 — Table 25: Entry Description (1010h ) 3.1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 20 / 86 Entry Description Sub-index Access PDO Mapping Value Range Default Value 0 rw no UNSIGNED16 0 Table 32: Entry Description (1015h ) 3.1.13 Object 1016h : Consumer Heartbeat Time The consumer heartbeat time defines the expected heartbeat cycle time and thus has to be higher than the corresponding producer heartbeat time configured on the module producing this heartbeat.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Object Description Index Name Object Type Data Type 1017h Producer heartbeat time Variable UNSIGNED16 Table 36: Object Description (1017h ) Entry Description Sub-index Access PDO Mapping Value Range Default Value 0 rw no UNSIGNED16 0 Table 37: Entry Description (1017h ) 3.1.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 24 / 86 Entry Description Sub-index Description Access Value Range Default Value 00h Number of mapped application objects in PDO rw 0. . .
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 4.1.1 27 / 86 Object 2005h : Limit Switches This object defines which limit switches are to be used. Bit 0 stands for the left and bit 1 stands for the right limit switch. If a bit is set, the corresponding limit switch will not be used. So this object has to be set to the value 3 if limit switches are not connected.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Entry Description Sub- PDO index Name Mapping Min Max Default Unit Access 0 Supply Voltage no 0 280 240 [100mV] R Table 56: Entry Description (200Eh ) 4.1.4 Object 200Fh : Driver Temperatur The actual temperature of the motor driver.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 4.1.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 4.1.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 4.1.11 Object 2056h : Velocity Ramp Mode An activated ramp allows a defined acceleration for velocity and position mode.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Entry Description Sub- PDO index Name Mapping Min Max Default Unit Access 1 ActualAngle no -32768 32767 0 R 2 StepsPerRotation no 0 65535 4096 RW 3 Offset no 0 65535 0 RW 4 Direction no 0 1 0 RW 5 InitMode no 0 2 1 RW 6 InitDelay no 0 10000 1000 [ms] RW 7 InitVelocity no -200000 200000 100 [rpm] RW Table 76: Entry Description (2080h ) 4.1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 36 / 86 Entry Description Sub-index Description Access PDO Mapping Value Range Default Value 1 Physical outputs rw yes UNSIGNED32 0 2 Output mask rw yes UNSIGNED32 0 Table 84: Entry Description (2703h ) 4.1.17 Object 2704h : CAN Bit Rate With this object it is possible to change the CAN bit rate. To do this, first write the new value to this object.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Entry Description Sub- PDO index Name Mapping Min Max Default 0 Node ID no 1 127 1 Unit Access RW Table 88: Entry Description (2705h ) 4.1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 38 / 86 Entry Description Sub- PDO index Name Mapping Min Max Default Unit Access 1 ADC_phase_A no 0 4095 0 R 2 ADC_phase_B no 0 4095 0 R 3 ADC_VSupply no 0 4095 0 R 4 ADC_Temp no 0 4095 0 R Table 92: Entry Description (270Eh ) 5 Profile specific area The profile segment contains CiA-402 standard motion control objects.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 39 / 86 Entry Description Sub- PDO index Name Mapping Min Max Default 0 Quick Stop Option Code no 1 6 0 Unit Access RW Table 94: Entry Description (605Ah ) 5.1.2 Object 605Bh : Shutdown Option Code This object indicates what action is performed if there is a transition from operation enabled state to ready to switch on state.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Entry Description Sub- PDO index Name Mapping Min Max Default 0 Disable Operation Option Code no 1 1 1 Unit Access RW Table 98: Entry Description (605Ch ) 5.1.4 Object 605Dh : Halt Option Code This object indicates what action is performed when the halt function is executed. The slow down ramp is the deceleration value of the used mode of operation.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 41 / 86 Entry Description Sub- PDO index Name Mapping Min Max Default 0 Fault Reaction Option Code no 2 2 2 Unit Access RW Table 102: Entry Description (605Eh ) 5.1.6 Object 6060h : Modes of Operation This object indicates the requested operation mode.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 42 / 86 Object Description Index Name Object Type Data Type 6061h Modes of Operation Display Variable SIGNED8 Table 105: Object Description (6061h ) Entry Description Sub- PDO index Name Mapping Min Max Default 0 Modes of Operation Display no 0 10 0 Unit Access R Table 106: Entry Description (6061h ) 5.1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 43 / 86 Object Description Index Name Object Type Data Type 6099h Homing Speeds Array UNSIGNED32 Table 109: Object Description (6099h ) Entry Description Sub- PDO index Name Mapping Min Max Default Unit Access 1 Fast Homing Speed no 0 4294967295 0 RW 2 Slow Homing Speed no 0 4294967295 0 RW Table 110: Entry Description (6099h ) 5.1.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 46 / 86 Structure of the Control Word 15 11 10 9 8 7 r oms h fr nu 6 4 oms 3 2 1 0 eo qs ev so MSB LSB Legend: nu=not used; r=reserved; oms=operation mode specific; h=halt; fr=fault reset; eo=enable operation; qs=quick stop; ev=enable voltage; so=switch on.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 47 / 86 Entry Description Sub-index Access PDO Mapping Value Range Default Value 0 rw see CiA402-3 See command coding above. Table 119: Entry Description (6040h in pp Mode) 6.2.2 Object 6041h : Status Word This object provides the status of the PDS FSA. It reflects the status of the CiA-402 state machine. Please refer to figure 4 for detailed information. The object is structured as defined below.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Entry Description Sub- PDO index Name Mapping Min Max Default 0 Position Demand Value no -2147483648 2147483647 0 Unit Access R Table 127: Entry Description (6062h ) 6.2.4 Object 6063h : Position Actual Internal Value This object provides the actual position value of the motor.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 6.2.6 Object 6067h : Position Window This object indicates the configured symmetrical range of accepted positions relative to the target position. If the actual value of the position encoder is within the position window, this target position is regarded as having been reached. The value is given in increments.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Object Description Index Name Object Type Data Type 607Ah Target Position Variable SIGNED32 Table 136: Object Description (607Ah ) Entry Description Sub- PDO index Name Mapping Min Max Default 0 Target Position no -2147483648 2147483647 0 Unit Access RW Table 137: Entry Description (607Ah ) 6.2.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 52 / 86 Object Description Index Name Object Type Data Type 6081h Profile Velocity (pp) Variable UNSIGNED32 Table 140: Object Description (6081h ) Entry Description Sub- PDO index Name Mapping Min Max Default Unit Access 0 Profile Velocity no 0 200000 0 [rpm] RW Table 141: Entry Description (6081h ) 6.2.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Entry Description Sub- PDO index Name Mapping Min Max Default Unit Access 0 Profile Acceleration no 0 100000 2000 [rpm/s] RW Table 145: Entry Description (6083h ) 6.2.13 Object 6084h : Profile Deceleration This object indicates the configured deceleration.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 6.3 54 / 86 How to move a Motor in pp Mode Here is a little example that shows how to get a motor running in pp mode. In this little example we assume that the module has been reset (and then switched to pre-operational or operational) by NMT commands before. Please note that the values are decimal.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 7 55 / 86 Profile Velocity Mode The profile velocity mode is used to control the velocity of the drive without a special regard of the position. It contains limit functions and trajectory generation. The profile velocity mode covers the following sub-functions: • Demand value input via trajectory generator. • Monitoring of the profile velocity using a window-function.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Trinamic Specific Bits Bit Name Definition 14 Motor activity 0: Motor stands still. 1: Motor rotates. 15 Direction of rotation This bit shows the direction of rotation. Table 155: Trinamic Specific Bits Operation Mode specific Bits in pv Mode Bit Name Definition 10 Target reached Indicates that the target speed has been reached. 12 Speed Not supported. 13 Max. slippage error Not supported.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Entry Description Sub-index Access PDO Mapping Value Range Default Value 0 rw see CiA402-3 See state coding above Table 159: Entry Description (6041h in pv Mode) 7.1.3 Object 6062h : Position Demand Value This object provides the demanded position value. The value is given in hall or encoder steps. Object 6062h indicates the actual position that the motor should have.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 7.1.5 Object 6064h : Position Actual Value This object provides the actual value of the position measurement device. It always contains the same value as object 6063h.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Entry Description Sub- PDO index Name Mapping Min Max Default Unit Access 0 Quick Stop Deceleration no 0 100000 2000 [rpm/s] RW Table 173: Entry Description (6085h ) 7.1.10 Object 60FFh : Target Velocity This object indicates the configured target velocity and is used as input for the trajectory generator. Object 60FFh sets the target velocity when using profile velocity mode.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 7.2 62 / 86 How to move a Motor in pv Mode Here is a little example that shows how to get a motor running in pv mode. In this little example we assume that the module has been reset (and then switched to pre-operational or operational) by NMT commands before. • Select pv mode by writing 3 to object 6060h (Modes_of_Operation). • Write 6 to object 6040h (Controlword) to switch to READY_TO_SWITCH_ON state.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 8 63 / 86 Homing mode This chapter describes the method by which a drive seeks the home position (reference point). There are various methods of achieving this using limit switches at the ends of travel or a home switch in mid-travel. Some methods also use the index (zero) pulse train from an incremental encoder. The user may specify the speeds, acceleration and the method of homing.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 64 / 86 Supported Homing Methods Method Description 0 No homing (default value for object 6098h ). 17 Search the left end switch. 18 Search the right end switch. 35 The actual position is used as home position. All position values (objects 6062h, 6063h, and 6064h) are set to zero, but the motor will not move.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 8.2 8.2.1 65 / 86 Detailed Object Specifications Object 6040h : Control Word This object indicates the received command controlling the power drive system finite state automaton (PDS FSA). The CiA-402 state machine can be controlled using this object. Please refer to figure 4 for detailed information.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 66 / 86 Object Description Index Name Object Type Data Type 6040h Controlword Variable UNSIGNED16 Table 181: Object Description (6040h in hm Mode) Entry Description Sub-index Access PDO Mapping Value Range Default Value 0 rw see CiA402-3 See command coding above. Table 182: Entry Description (6040h in hm Mode) 8.2.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Operation Mode specific Bits in hm Mode Bit Name Definition 10 Target reached Set when the zero position has been found or homing has been stopped by setting controlword bit 4 to zero. 12 Home attained Set when zero position has been found. 13 Homing error Not supported.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Object Description Index Name Object Type Data Type 606Ch Velocity Actual Value Variable SIGNED32 Table 189: Object Description (606Ch ) Entry Description Sub- PDO index Name Mapping Min Max Default Unit Access 0 Velocity Actual Value no -2147483648 2147483647 0 [rpm] R Table 190: Entry Description (606Ch ) 8.2.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 69 / 86 Entry Description Sub- PDO index Name Mapping Min Max Default 0 Homing Method no 0 35 0 Unit Access RW Table 194: Entry Description (6098h ) 8.2.6 Object 6099h : Homing Speeds This object indicates the configured speeds used during fast and slow homing procedure. In most homing modes, the home switch is searched with the fast speed first.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Entry Description Sub- PDO index Name Mapping Min Max Default Unit Access 0 Homing Acceleration no 0 100000 2000 [rpm/s] RW Table 198: Entry Description (609Ah ) 8.2.8 Object 2100h : Home Offset Display This object shows the home offset. The value is given in encoder or hall increments.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 8.3 71 / 86 How to start a Homing in hm Mode Here is a little example that shows how to home the motor in hm mode. In this little example we assume that the module has been reset (and then switched to pre-operational or operational) by NMT commands before. The home switch must be connected to the home switch input. It can be operated manually. • Select hm mode by writing 6 to object 6060h .
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 9 72 / 86 Cyclic synchronous Torque Mode The cyclic synchronous torque mode is used to directly control the torque of the motor, without the need for position or velocity control. It contains limit functions, but not a trajectory generator. The cyclic synchronous torque mode covers the following sub-functions: • Demand value input directly via an object. • Monitoring and limiting the torque. 9.1 9.1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 73 / 86 Object Description Index Name Object Type Data Type 6040h Controlword Variable UNSIGNED16 Table 203: Object Description (6040h in cst Mode) Entry Description Sub-index Access PDO Mapping Value Range Default Value 0 rw see CiA402-3 See command coding above. Table 204: Entry Description (6040h in cst Mode) 9.1.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Operation Mode specific Bits in cst Mode Bit Name Definition 10 Reserved Not used. 12 Target torque ignored 0: Target torque ignored. 1: Target torque used as input to control loop. 13 Reserved Not used.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Object Description Index Name Object Type Data Type 6071h Target Torque Variable SIGNED32 Table 211: Object Description (6071h ) Entry Description Sub- PDO index Name Mapping Min Max Default Unit Access 0 Target Torque no -3000 3000 0 [mA] RW Table 212: Entry Description (6071h ) 9.1.4 Object 6077h : Torque Actual Value The actual motor current.
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Entry Description Sub- PDO index Name Mapping Min Max Default 0 Torque offset no -2147483648 2147483647 0 Table 216: Entry Description (60B2h ) ©2018 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany Terms of delivery and rights to technical change reserved. Download newest version at www.trinamic.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 9.2 77 / 86 How to move a Motor in cst Mode Here is a little example that shows how to get a motor running in cst mode. In this little example we assume that the module has been reset (and then switched to start) by NMT commands before. • If you do not have any limit switches connected, first disable the limit switch inputs by writing 3 to object 2005h . • Select cst mode by writing 10 to object 6060h .
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 10 78 / 86 Emergency Messages (EMCY) The module sends an emergency message if an error occurs. The message contains information about the error type. The module can map internal errors and object 1001h (error register) is part of every emergency object.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 Error code Additional byte 79 / 86 Description 1 2 3 4 5 8110h 1 255 0 0 0 CAN controller overflow The receive message buffer of the CAN controller hardware is full and some CAN messages are lost. 8110h 2 255 0 0 0 CAN Tx buffer overflow The software CAN transmit buffer is full and thus some CAN messages are lost.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 11 1 2 3 80 / 86 Figures Index NMT State Machine . . . . . . . . . . . Communication Architecture . . . . . Device Model . . . . . . . . . . . . . . 10 11 12 ©2018 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany Terms of delivery and rights to technical change reserved. Download newest version at www.trinamic.com 4 DS402 Finite State Machine . . . . . . 45 5 Homing Mode Function . . . . . . .
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 12 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 Tables Index Abbreviations used in this Manual Service Primitives . . . . . . . . . . Service Types . . . . . . . . . . . . Object Dictionary . . . . . . . . . . Object Description (1000h ) . . . . . Entry Description (1000h ) . . . . .
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 Object Description (6061h ) . . . . . . . Entry Description (6061h ) . . . . . . . Object Description (608Fh ) . . . . . . . Entry Description (608Fh ) . . . . . . . Object Description (6099h ) . . . . .
/ 86 PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 207 208 209 210 211 212 213 Operation Mode specific Bits in cst Mode State Coding . . . . . . . . . . . . . . . Object Description (6041h in cst Mode) Entry Description (6041h in cst Mode) Object Description (6071h ) . . . . . . . Entry Description (6071h ) . . . . . . . Object Description (6077h ) . . . . . . . 74 74 74 74 75 75 75 ©2018 TRINAMIC Motion Control GmbH & Co.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 13 84 / 86 Supplemental Directives 13.1 Producer Information 13.2 Copyright TRINAMIC owns the content of this user manual in its entirety, including but not limited to pictures, logos, trademarks, and resources. © Copyright 2018 TRINAMIC. All rights reserved. Electronically published by TRINAMIC, Germany.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 85 / 86 or of any other nature are made hereunder with respect to information/specification or the products to which information refers and no guarantee with respect to compliance to the intended use is given. In particular, this also applies to the stated possible applications or areas of applications of the product.
PD42-x-1670 CANopen Firmware Manual • Firmware Version V2.0 | Document Revision V1.0 • 2018-Nov-07 14 14.1 Revision History Firmware Revision Version Date Author Description 2.00 06.11.2018 ED First release. Table 218: Firmware Revision 14.2 Document Revision Version Date Author Description 1.00 07.11.2018 ED First release. Table 219: Document Revision ©2018 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany Terms of delivery and rights to technical change reserved.