
Reference Manual










Table Of Contents
- Table of Contents
- Welcome
- Main Menu
- File Menu
- Job Menu
- Job Menu – GPS
- Job Menu – Basic GPS
- Survey Menu
- Backsight Setup
- Traverse / Sideshot
- Repetition Shots
- Multiple Sideshots
- Radial Sideshots
- Distance Offset Shot
- Horizontal Angle Offset
- Vertical Angle Offset
- Auto Collect
- Corner & 2 Lines
- Corner & Angle
- Corner & Offset
- Corner & Plane
- Surface Scan
- Video Scan
- Shoot From Two Ends
- Record Mode
- Resection
- Remote Elevation
- Check Point
- Solar Observation
- Remote Control
- Survey Menu – GPS
- Survey Menu – Basic GPS
- Leveling Menu
- Stakeout Menu
- Stakeout Menu – GPS and Basic GPS
- Inverse Menu
- Cogo Menu
- Curve Menu
- Roads Menu
- Adjust Menu
- Miscelaneous Screens
- Appendix A
- Index
Stakeout Menu – GPS & Basic GPS Module
R-339
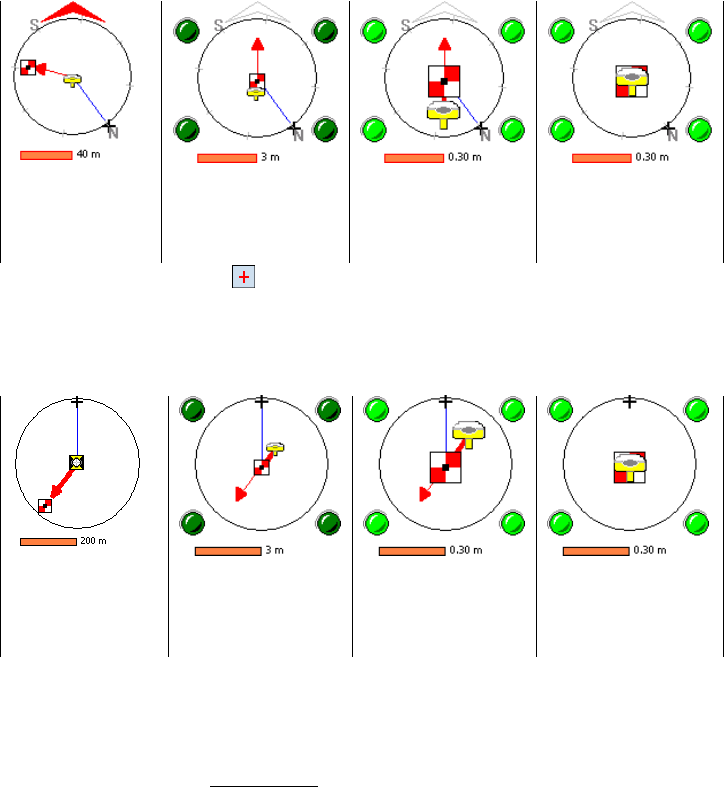
indicator will stop updating to assist you in more precisely locating
the design point as illustrated below.
Rover is greater
than 3 m (10 ft)
from the design
point.
Rover is between 0.3
and 3 m (1 and 10 ft),
from the design point.
Rover is within 0.3 m
(1 ft) of the design
point.
Rover is within the
horizontal tolerance
specified in the
stakeout settings
When using the method, your reference point or azimuth will
always appear at the top of the screen and that is the direction you
should be facing while navigating. Like with the other navigation
method, the graphic will change as you get closer to the design point.
Each graphic is shown below.
Rover is greater
than 3 m (10 ft)
from the design
point.
Rover is between 0.3
and 3 m (1 and 10 ft),
from the design point.
Rover is within 0.3 m
(1 ft) of the design
point.
Rover is within the
horizontal tolerance
specified in the
stakeout settings
GPS Status: displays the current solution type, the number of
satellites used, and the horizontal and vertical precision computed by
the receiver. When this area of the screen is tapped, the epoch count
stops and the GPS Status
screen opens (Page R-176).
Go SOUTH / NORTH: displays the distance the rover must move in a
south or north direction to reach the design point.
Go EAST / WEST: displays the distance the rover must move in an
east or west direction to reach the design point.