
Reference Manual










Table Of Contents
- Table of Contents
- Welcome
- Main Menu
- File Menu
- Job Menu
- Job Menu – GPS
- Job Menu – Basic GPS
- Survey Menu
- Backsight Setup
- Traverse / Sideshot
- Repetition Shots
- Multiple Sideshots
- Radial Sideshots
- Distance Offset Shot
- Horizontal Angle Offset
- Vertical Angle Offset
- Auto Collect
- Corner & 2 Lines
- Corner & Angle
- Corner & Offset
- Corner & Plane
- Surface Scan
- Video Scan
- Shoot From Two Ends
- Record Mode
- Resection
- Remote Elevation
- Check Point
- Solar Observation
- Remote Control
- Survey Menu – GPS
- Survey Menu – Basic GPS
- Leveling Menu
- Stakeout Menu
- Stakeout Menu – GPS and Basic GPS
- Inverse Menu
- Cogo Menu
- Curve Menu
- Roads Menu
- Adjust Menu
- Miscelaneous Screens
- Appendix A
- Index
Survey Pro Reference Manual
R-166
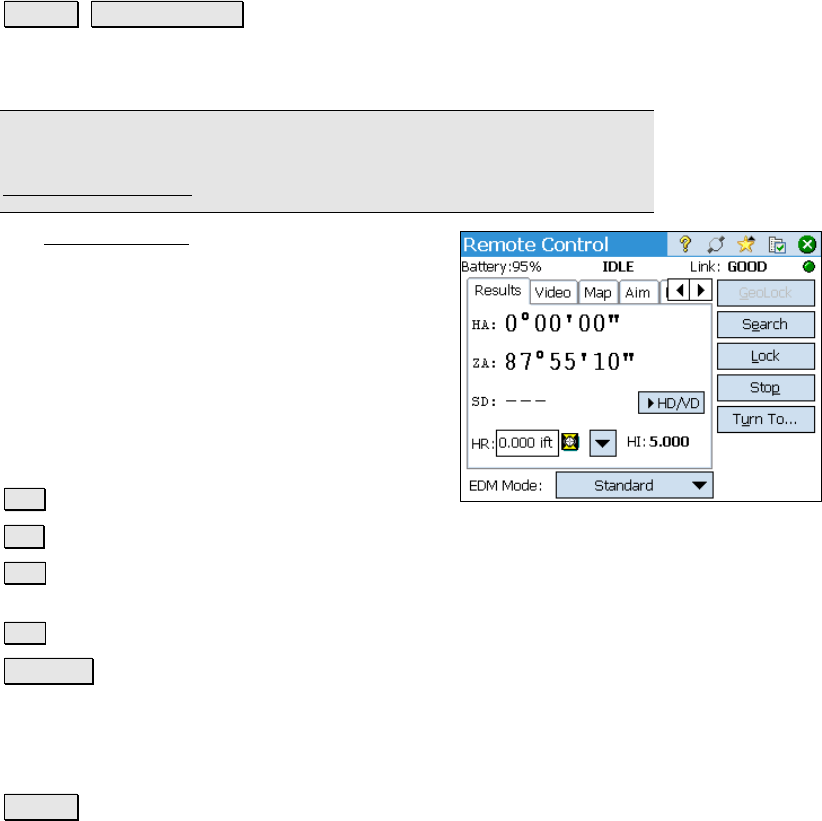
Remote Control
Survey Remote Control.
Remote control mode is a special mode that makes it easier for users
to control fully robotic total stations from a remote data collector.
Note: The remote control functions are available only after a
supported robotic total station is selected and enabled in the
Instrument Settings screen.
The Remote Control screen allows you to turn
the total station in any direction using the
arrow buttons on the keypad and control the
tacking functions.
The arrow keys are typically used to get the
total station to aim in the general vicinity of
the prism prior to initiating a search. The total
station will continue to turn in the direction of
the button as long as the button remains
pressed.
Ï
: aims the scope upward.
Ð : aims the scope downward.
Î
: turns the scope to the right (as you face the total station from
the data collector).
Í
: turns the scope to the left.
GeoLock : This button is available when GeoLock is enabled and
when a supported total station has lost lock on the prism. Tapping it
will turn the total station to the area of the prism computed by the
GPS solution, followed by a prism search. (See the User’s Manual for
more information on using GeoLock.)
Search : starts the search routine where the total station searches in
a specific pattern until it “sees” the prism and then stops.