
Guide











1/22/2018 micro:bot Kit Experiment Guide - learn.sparkfun.com
https://learn.sparkfun.com/tutorials/microbot-kit-experiment-guide/all#about-the-motobit-board 57/75
In the previous experiment you used a single line sensor (the middle sensor) to detect the line on the floor. That is
great for staying inside of a line, but now, you need to follow a line. That is where the other two line sensors come in.
Essentially, you want the center sensor to detect the line, but not the other two, meaning that the robot is centered on
the line. If one of the side sensors detect a line it means that you are veering to one side or another and your robot
should correct itself. We will use the information from multiple sensors combined with an if/else statement block to
build a decision tree for your robot to follow.
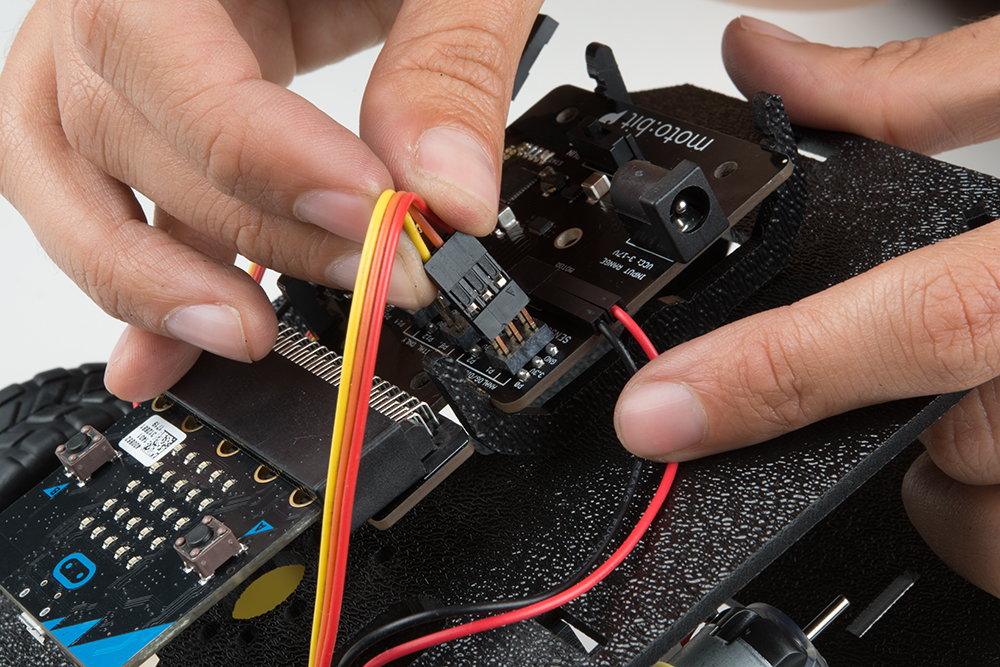
Hardware Hookup
Note: If you already hooked up your sensors in Experiment 2, please skip this section.
Like the motors, you should have already hooked up the line sensors during the assembly portion of this guide. You
can go there now for the full assembly instructions. Double check to make sure that the wires are hooked up to your
line sensors correctly!
{kind=link}