
Clock Radio User Manual










Table Of Contents
- CP-UM-5093E-04.pdf
- SAFETY PRECAUTIONS
- Contents
- Chapter 1. GENERAL
- Chapter 2. NAMES & FUNCTIONS OF PARTS
- Chapter 3. MOUNTING
- Chapter 4. WIRING
- 4-1 Wiring Precautions
- 4-2 Compensating Lead
- 4-3 Terminal Connections
- 4-4 Layout of Terminals and Recommended Lead Draw-out Direction
- 4-5 Connecting the Ground and Power Supply
- 4-6 Wiring of Standard and Add-on Terminal Base
- 4-7 Connecting Inputs (analog inputs)
- 4-8 Connecting control outputs (outputs 1, 2)
- 4-9 Connecting auxiliary outputs (outputs 2, 3)
- 4-10 Connecting Event Output (relay output)
- 4-11 Connecting Time Event Output (open-collector)
- 4-12 Connecting External Switch (RSW) Input
- 4-13 Connecting for Communications
- 4-14 Isolating Inputs and Outputs
- Chapter 5. FUNCTIONS
- Chapter 6. OPERATION
- Chapter 7. PARAMETER SETUP
- Chapter 8. PROGRAM SETUP
- Chapter 9. TROUBLESHOOTING
- Chapter 10. SPECIFICATIONS
- Chapter 11. CALIBRATION
- Index
Chapter 4. WIRING
4-9
WARNING
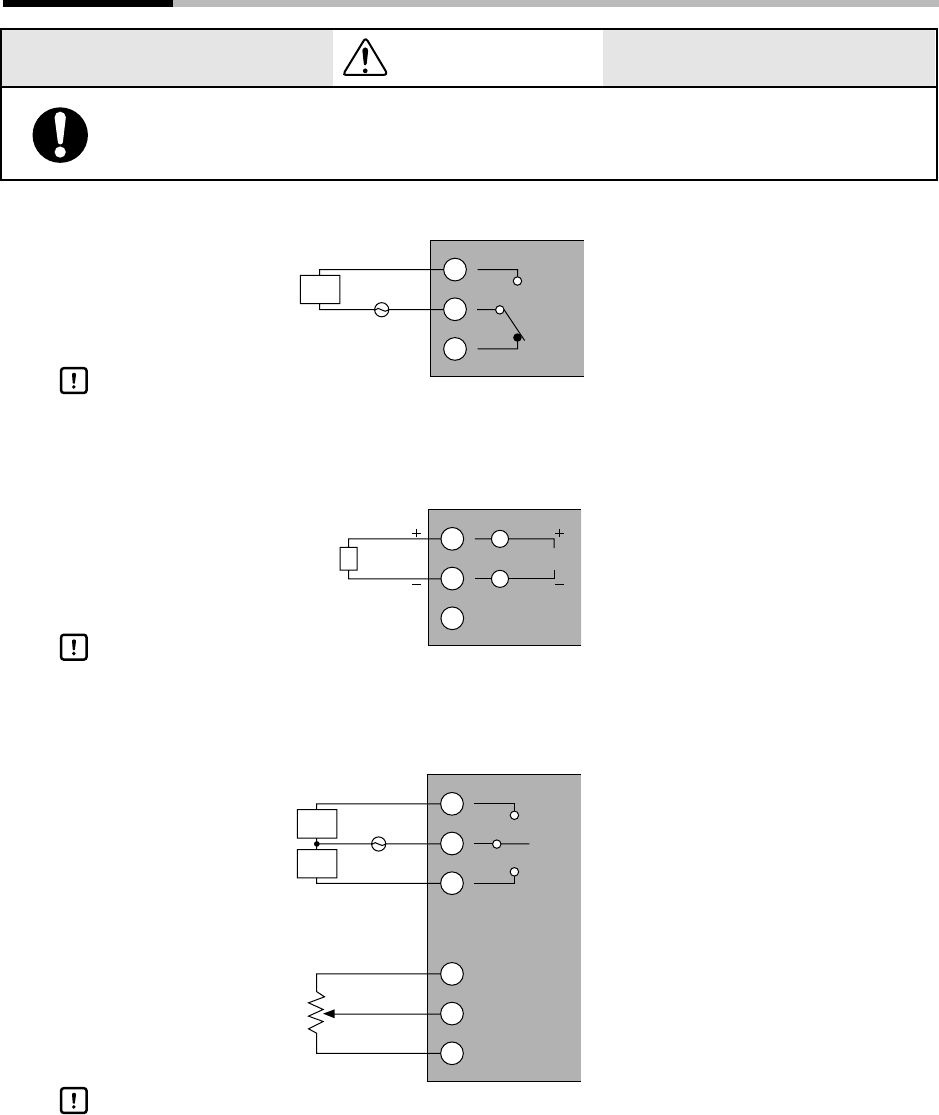
4-8 Connecting control outputs (outputs 1, 2)
Before wiring, or removing/mounting the DCP301, be sure to turn the power
OFF. Failure to do so might cause electric shock.
■ Relay output (0D)
Connect as follows.
11
12
13
Load
Power supply
Contact rating, resistive load
5A (30Vdc/120Vac)
4A (240Vac)
Minimum switching current: 100mA
When switching small currents, connect a bleeder resistor to allow current flow of
the minimum relay switching input (100mA min.).
■ Current output (5G)
Connect as follows.
11
12
13
Actuator
4 to 20/0 to 20mAdc
Resistive load 600Ω max.
11
12
13
14
15
16
G
T
Y
1
3
2
Open side
Power supply
Closed side
Open
Closed
Contact rating
4A (120Vac, cosø=0.4)
2A (240Vac, cosø=0.4)
Feedback resistance
100 to 2500Ω
Load
Load
• The life of internal relays is limited.
Avoid setting the PID constant in such a way that results in excessive repeated
ON/OFF switching.
• When using a 100/200Vac motor, pay attention to rush current and the contact
rating. If necessary, provide an external auxiliary relay.
• Separate the wiring for motor terminals (11) (12) (13) and feedback resistor
terminals (14) (15) (16).
(Do not wire the leads in the same duct or use 6-core cable. Doing so might
result in faulty controller operation caused by electrical noise when the motor is
started up.)
• When controlling without motor feedback with variable parameter M .-Cset to
“2”, terminals (14) (15) (16) need not be connected.
4 to 20mAdc and 0 to 20mAdc can be selected in setup data C 9 0.
■ Position-proportional output (2G)
Connect as follows paying attention to the switching direction.
Handling Precautions
Handling Precautions
Handling Precautions