
Datasheet









Technical Note
BD9111NV
10/13
www.rohm.com
2010.04 - Rev.B
© 2010 ROHM Co., Ltd. All rights reserved.
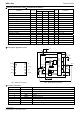
4. Determination of RITH, CITH that works as a phase compensator
As the Current Mode Control is designed to limit a inductor current, a pole (phase lag) appears in the low frequency area
due to a CR filter consisting of a output capacitor and a load resistance, while a zero (phase lead) appears in the high
frequency area due to the output capacitor and its ESR. So, the phases are easily compensated by adding a zero to the
power amplifier output with C and R as described below to cancel a pole at the power amplifier.
Stable feedback loop may be achieved by canceling the pole fp (Min.) produced by the output capacitor and the load
resistance with CR zero correction by the error amplifier.
Fig.30 Open loop gain characteristics
Fig.31 Error amp phase compensation characteristics
fp=
2π×R
O×CO
1
fz
(ESR)=
2π×E
SR×CO
1
Pole at power amplifie
r
When the output current decreases, the load resistance Ro
increases and the pole frequency lowers.
fp(Min.)=
2π×R
OMax.×CO
1
[Hz]←with lighter load
fp(Max.)=
2π×R
OMin.×CO
1
[Hz] ←with heavier load
Zero at power amplifie
r
fz(Amp.)=
2π×R
ITH×CITH
1
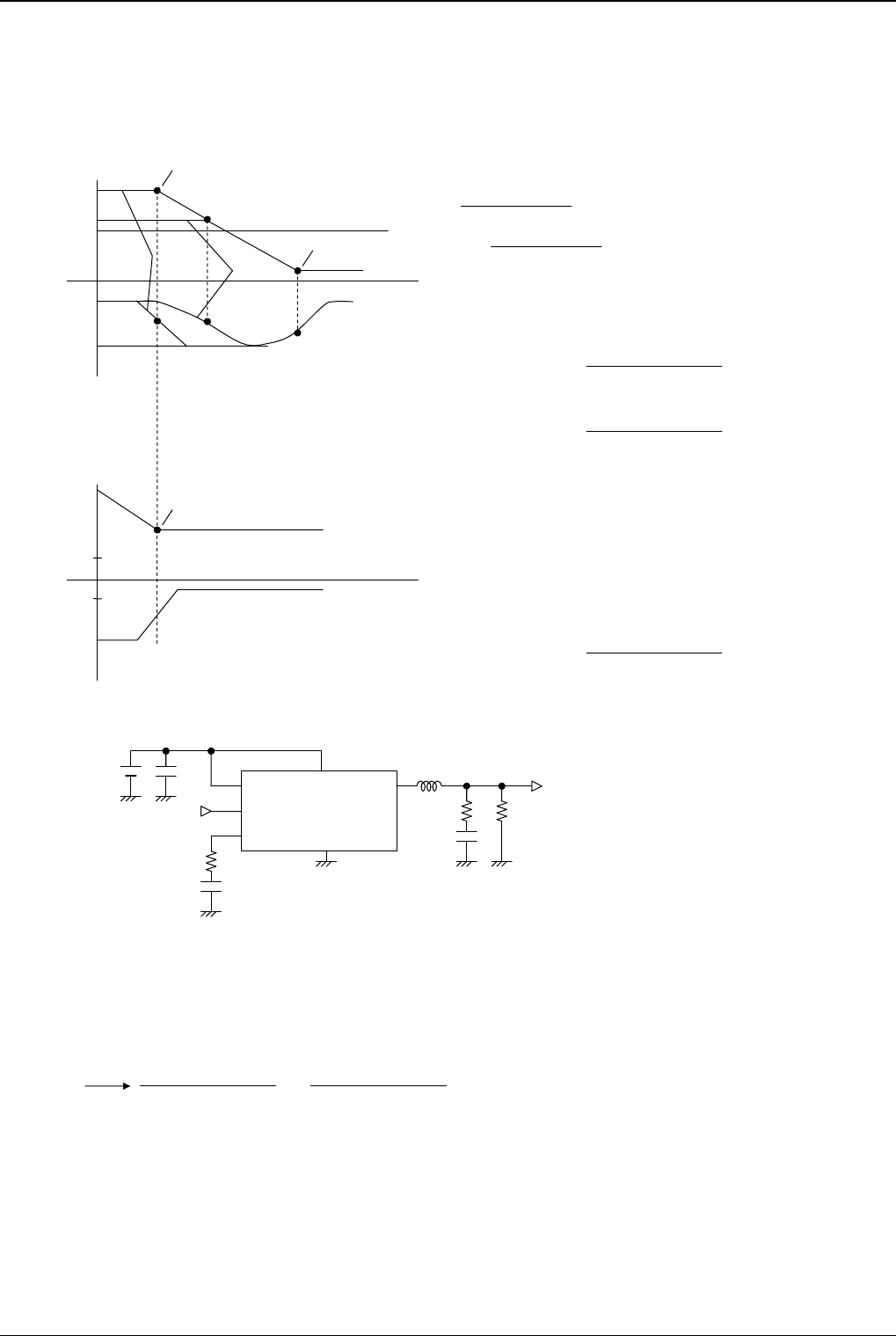
GND,PGND
SW
V
CC,PVCC
EN
V
OUT
ITH
V
CC
V
OUT
Cin
R
ITH
C
ITH
L
ESR
C
O
RO
VOUT
Fig.32 Typical application
fz
(Amp.)= fp(Min.)
2π×RITH×CITH
1
=
2π×R
OMax.×CO
1
Gain
[dB]
Phase
[deg]
A
0
0
-90
A
0
0
-90
fz(Amp.)
fp(Min.)
fp(Max.)
fz(ESR)
IOUTMin.
I
OUTMax.
Gain
[dB]
Phase
[deg]
Increasing capacitance of the output capacitor lowers the pole
frequency while the zero frequency does not change. (This
is because when the capacitance is doubled, the capacito
r
ESR reduces to half.)