
User guide









Programming Reference
4-5
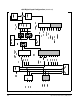
r.020, r.021, r.022 Outer Loop PI Regulator
(continued)
The RMI board provides the option to make the torque limit and current limit a function
of the RMI analog input or the RMI frequency input, depending on r.025. When the
RMI board is not present, there is no adjustable limit.
For vector regulation, the torque limit can be adjusted. For V/Hz regulation, the current
limit can be adjusted. The value of r.025 determines the source for the limit. When
r.025 = 0, the limit is set to 4095. When r.025 = 1 or 2, the limit comes from the RMI
board. This can be the RMI analog input or the RMI frequency input. The output of the
torque limit is normalized so that 4095 corresponds to 150%. The output of the current
limit is normalized so that 4095 corresponds to 200%.
Figure 4.2 – PI Regulator Operating Modes
r.025 Torque or Current Limit Selection
Par. Parameter Name Type Default Step Range
r.025 Torque/Current Limit
Source
Config. 0 1 0 = No adjustable limit.
1 = Limit adjusted based on normalized
RMI analog input.
2 = Limit adjusted based on normalized
RMI frequency input.
Offset
RMI
RMI
Offset
P.015
P.015
P.015