
Software Start-Up and Ref. Owner manual










Table Of Contents
- GV3000/SE AC General Purpose (V/Hz) and Vector Duty Drive, 1 - 20 HP, 230V AC Software Start-Up and Reference Manual D2-3387-5
- Important User Information
- Document Update
- Summary of Changes
- Table of Contents
- List of Figures
- List of Tables
- Preface
- Chapter 1 - Starting Up the Drive for Volts/Hertz Regulation
- Chapter 2 - Starting Up the Drive for Vector Regulation
- Chapter 3 - Using the Keypad/Display To Program, Monitor, and Control the Drive
- Chapter 4 - Programming Reference
- Chapter 5 - Troubleshooting the Drive Using Error Codes
- Appendix A - Alphabetical Listing of Parameters
- Appendix B - Record of User Parameter Settings
- Appendix C - Power Module-Dependent Parameter Default Values (230 V Series)
- Appendix D - Default Parameter Settings
- Appendix E - Configuring the Digital Inputs When the RMI Board Is Installed in the Drive
- Appendix F - Using the Terminal Strip Analog Input
- Appendix G - Drive Regulation Overview
- Back Cover / Publication D2-3387-5 July 2013
4-82
GV3000/SE 230 VAC Drive, Software Reference Version 6.04
U.021 Rotor Time Constant
This parameter
determines the
performance of the
magnetizing current
regulator.
For most
applications, it is
recommended that
this parameter not be
changed.
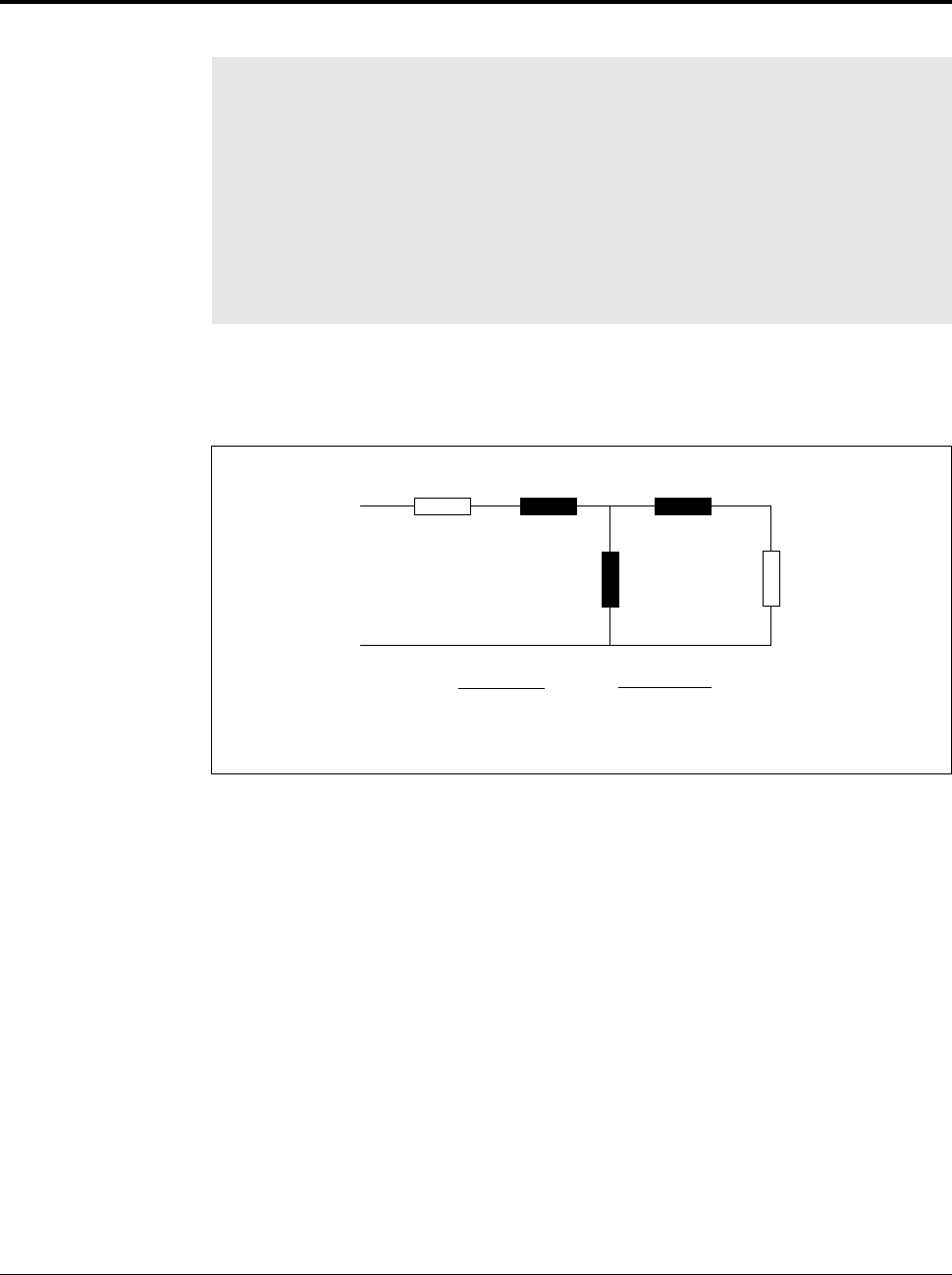
For special motors or for motors with base speeds < 1150 RPM, the rotor time
constant must be calculated by evaluating equivalent motor circuit data as shown in
figure 4.14.
Parameter Range: 100 to 9999 milliseconds
Default Setting: Power Module-dependent, see Appendix C
Parameter Type: Tunable
Refer also to parameters: N/A
Figure 4.14 – Motor Equivalent Circuit Diagram for Calculating Rotor Time Constant
To calculate the rotor time constant, use the following formula:
Rotor time constant = L / R2
Where: L = Lm + L2
Lm = Xm / 2 x 3.14 x 60
L2 = X2 / 2 x 3.14 x 60
Note that this parameter is not functional in version 6.0 and later. It is maintained
for backward compatibility to previous firmware versions.
R1
X1
X2
Xm
R2
Resistance
R1 = Stator
R2 = Stator
Inductance
X1 = Stator
X2 = Rotor
Xm = Magnetizing