
User Manual






WebPak 3000 Drives: Register Map
7-11
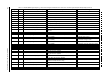
Table 7.7 – WebPak 3000 Register Map, Drop_1: Master Write Registers, BASIC and FULL Connections. Configurable Data (Drive Input Data)
Register Parameter Name (Number) Description Settings
61 FEEDBACK SELECT (P.200) Type of feedback for speed/voltage loop feedback ARMATURE VOLT; DC TACH ; ENCODER
62 NETW CONNECT TYPE (P.910) AutoMax network connection type BASIC, FULL
63 AMX NETW REF SELECT (P.911) AutoMax network reference selection DIRECT; BROADCAST N (N=1 to 8)
Configurable data are read by the regulator approximately every 600 msec when Tune/Config Input Enable bit=1 and the drive is not running or jogging.
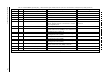
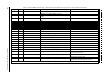
Table 7.8 – WebPak 3000 Register Map, Drop_2: Master Read Registers, FULL Connection. Runtime Signal Data (Drive Output Data)
Register Parameter Name (Number) Description Settings
0 ANALOG TACH FEEDBACK (P.291) Analog tachometer feedback input after scaling
1
ANALOG TRIM REF (P.195) Trim reference value when TRIM REFERENCE SELECT
(P.108) =
ANALOG
2 CML ERROR (P.398) CML error signal
3
DANCER LOADING (P.820) Rate-limited and scaled value of TENSION DEMAND (P.844)
4
ENCODER FEEDBACK (P.292) Digital value from pulse encoder after scaling
5
FIELD REFERENCE (P.590) Reference to the field regulator PI block as a percentage
of
MOTOR HOT FLD AMPS (P.510)
6
INSTANTANEOUS INERTIA (P.230) Dynamic load inertial as provided by the inertial
compensation task
7
NORM FIELD REF (P.130) Nominalized reference to the field shaping table
8
NORM ROLL DIAMETER (P.131) Roll diameter normalized at 1.000 at EMPTY CORE
DIAMETER (P.830)
9
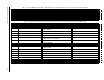
POSITION VERNIER (P.241) Output of the position major loop
10
REFERENCE RATE (P.866) Rate of change in the speed loop reference.
11
SPD LOOP ERROR (P.297) Speed loop error signal
12
SPD LOOP LAG OUTPUT (P.298) Output of the lag block following the speed loop PI block
13
TENSION DEMAND (P.844) Output of the tension setpoint generator in counts
14
TENSION VERNIER (P.856) Output of the tension major loop in counts
Runtime signal data are updated by the regulator every 10 msec.