
User Manual










360 Rockwell Automation Publication 20P-UM001K-EN-P - July 2014
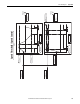
Appendix D Control Block Diagrams
PID Control
Gain
Thr
Thr 2
St ead y
State
Σ
-
+
sign PID
+
+
Gain
Initial
D iamet er
Calculator
T
T
ON
T
ON
PID Control
P787
PID Source Gain
P760
PID Setpoint 0
P761
PID Setpoint 1
P758
Feed Fwd PID
P731
PID Steady Delay
P765
PI Prop Gain PID
P793
PI Init Prop Gn
P769
Enable PI
P784
PI Upper Limit
P771
PI Output
P418
Real FF PID
P772
PID Output Sign
P773
PID Output Scale
P782
PID Target
P774
PID Output
P771
PI Output
P776
PI Central v1
P777
PI Central v2
P785
PI Lower Limit
P779
PI Central v sel
P778
PI Central v3
P783
PI integr freeze
P770
Enable PD
Encoder Position
P414
Fdbk Device Type
P800
Diameter Calc St
P794
Diameter Calc
P799
Minimum Diameter
P797
Gear Box Ratio
P771
PI Output
P795
DncrPosSpd
P796
Max Deviation
P798
Dancer Constant
P767
PD Deriv Filter
P791
PD Deriv Gain 3
P789
PD Deriv Gain 2
P766
PD Deriv Gain 1
P790
PD Prop Gain 3
P788
PD Prop Gain 2
P768
PD Prop Gain 1
P764
PI Integral Gain
P734
PI Init Intgl Gn
Gain
Feed Fwd Sign:
Pos Gain = -1
Neg Gain = +1
P762
PID Setpoint Sel
P1046
PID Accel Time
P1047
PID Decel Time
P763
PID Feedback
P757
PID Clamp
P759
PID Error
Σ
P763
PID Feedback
+
+
(2 ms)
P695
PI Steady Thresh
P1254
PID Error Gain
P70
Anlg In1 Sel
P75
Anlg In2 Sel
P80
Anlg In3 Sel
P429
Resolver Pos Sel
P70
Anlg In1 Sel
P75
Anlg In2 Sel
P80
Anlg In3 Sel
P786
PID Source
P70
Anlg In1 Sel
P75
Anlg In2 Sel
P80
Anlg In3 Sel
P421
PD Output PID