
Manual










Table Of Contents
- PowerFlex 700H Adjustable Frequency AC Drive Programming Manual
- Summary of Changes
- Table of Contents
- Preface
- 1 - Drive Start-Up
- 2 - Programming and Parameters
- 3 - Troubleshooting
- Drive Status
- Faults and Alarms
- Manually Clear Faults
- Fault and Alarm Descriptions
- Fault Subcodes
- Clear Alarms
- Common Drive Symptoms and Corrective Actions
- Drive does not Start from Start or Run Inputs Wired to the Terminal Block
- Drive does not Start from HIM
- Drive does not Respond to Changes in Speed Command
- Motor and/or Drive will not Accelerate to Commanded Speed
- Motor Operation is Unstable
- Drive will not Reverse Motor Direction
- Stopping the Drive Results in a Decel Inhibit Fault
- Technical Support Options
- A - HIM Overview
- B - Application Notes
- C - History of Changes
- Index
- Back Cover
Rockwell Automation Publication 20C-PM001F-EN-P - March 2012 97
Application Notes Appendix B
Skip Frequency
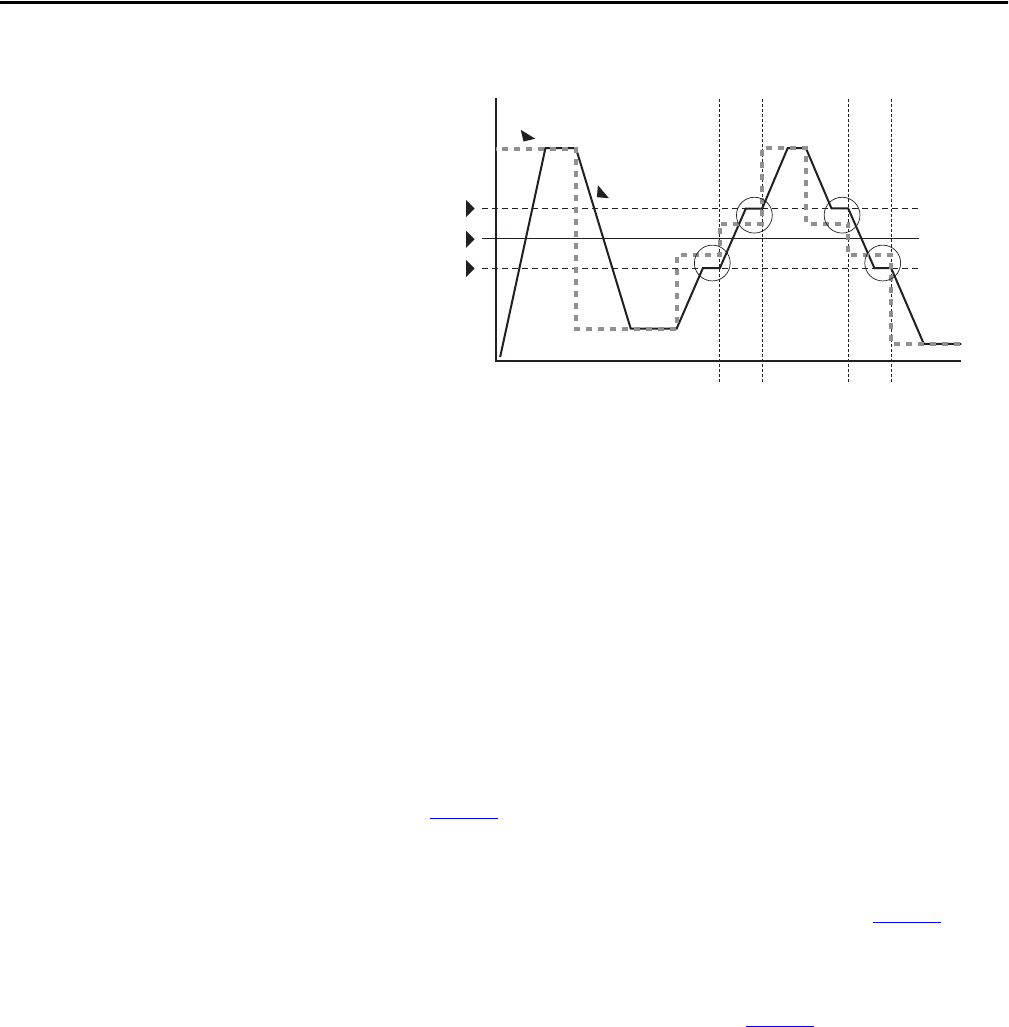
Figure 8 - Skip Frequency
Some machinery may have a resonant operating frequency that must be avoided
to minimize the risk of equipment damage. To assure that the motor cannot
continuously operate at one or more of the points, skip frequencies are used.
Parameters 084 [Skip Frequency 1] … 086, [Skip Frequency 3] are available to set
the frequencies to be avoided.
The value programmed into the skip frequency parameters sets the center point
for an entire “skip band” of frequencies. The width of the band (range of
frequency around the center point) is determined by parameter 87, [Skip Freq
Band]. The range is split, half above and half below the skip frequency parameter.
If the commanded frequency of the drive is greater than or equal to the skip
(center) frequency and less than or equal to the high value of the band (skip plus
1/2 band), the drive will set the output frequency to the high value of the band.
See (A) in Figure 8
.
If the commanded frequency is less than the skip (center) frequency and greater
than or equal to the low value of the band (skip minus 1/2 band), the drive will
set the output frequency to the low value of the band. See (B) in Figure 8
.
Acceleration and deceleration are not affected by the skip frequencies. Normal
accel/decel will proceed through the band once the commanded frequency is
greater than the skip frequency. See (A) & (B) in Figure 8
. This function affects
only continuous operation within the band.
Frequency
Time
(A)
(A)
(B)
(B)
Skip Frequency
Command
Frequency
Drive Output
Frequency
Skip + 1/2 Band
Skip – 1/2 Band
35 Hz
30 Hz
25 Hz