
Manual










Table Of Contents
- PowerFlex 700H Adjustable Frequency AC Drive Programming Manual
- Summary of Changes
- Table of Contents
- Preface
- 1 - Drive Start-Up
- 2 - Programming and Parameters
- 3 - Troubleshooting
- Drive Status
- Faults and Alarms
- Manually Clear Faults
- Fault and Alarm Descriptions
- Fault Subcodes
- Clear Alarms
- Common Drive Symptoms and Corrective Actions
- Drive does not Start from Start or Run Inputs Wired to the Terminal Block
- Drive does not Start from HIM
- Drive does not Respond to Changes in Speed Command
- Motor and/or Drive will not Accelerate to Commanded Speed
- Motor Operation is Unstable
- Drive will not Reverse Motor Direction
- Stopping the Drive Results in a Decel Inhibit Fault
- Technical Support Options
- A - HIM Overview
- B - Application Notes
- C - History of Changes
- Index
- Back Cover
94 Rockwell Automation Publication 20C-PM001F-EN-P - March 2012
Appendix B Application Notes
PI Enable
The output of the PI loop can be turned on (enabled) or turned off (disabled).
This control allows the user to determine when the PI loop is providing part or
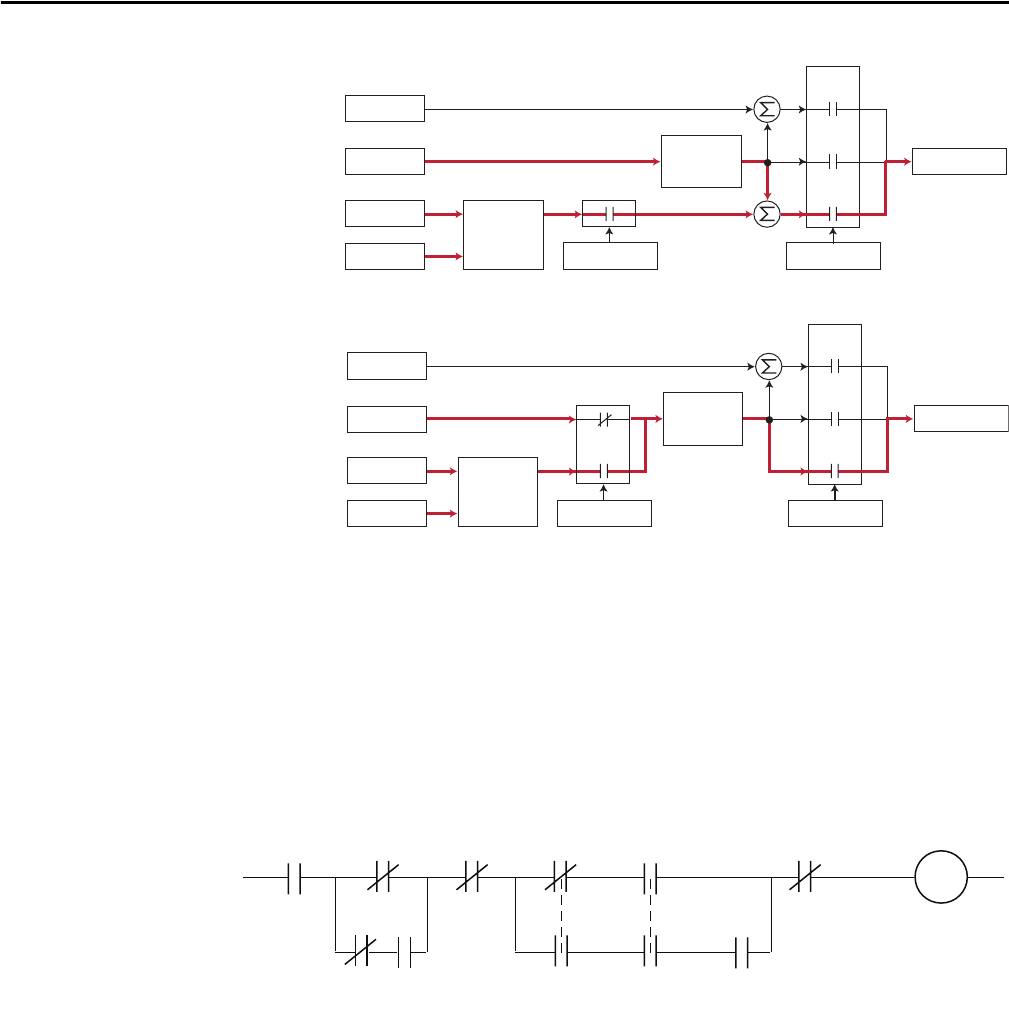
all of the commanded speed. The logic for enabling the PI loop is shown below.
The drive must be running for the PI loop to be enabled. The loop will be
disabled when the drive is ramping to a stop (unless “Stop Mode” is configured in
[PI Configuration]), jogging or the signal loss protection for the analog input(s)
is sensing a loss of signal.
If a digital input has been configured to “PI Enable,” two events are required to
enable the loop: the digital input must be closed AND bit 0 of the PI Control
parameter must be = 1.
+
Spd Cmd
Process PI
Controller
Linear Ramp
& S-Curve
+
+
+
PI Enabled
Speed Control
Spd Ref
PI Ref
PI Fbk
Slip Adder
Open
Loop
Slip
Comp
Process
PI
Spd Cmd
Process PI
Controller
Linear Ramp
& S-Curve
+
+
PI Enabled
Speed Control
Spd Ref
PI Ref
PI Fbk
Slip Adder
Open
Loop
Slip
Comp
Process
PI
Drive
Running
Drive
Ramping
to Stop
Drive
Jogging
Bit 0 of
[PI Control] = 1
(enabled)
[PI Configuration]
Signal Loss
The Configured
Digital Input
is Closed
A Digital Input
is Configured
to PI Enable
"Enabled" Status
Digital Input
is Reflected
in [PI Status]
Bit 0 = 1
The PI Loop
is Enabled
Bit 0 Bit 6