
Manual










Table Of Contents
- PowerFlex 700H Adjustable Frequency AC Drive Programming Manual
- Summary of Changes
- Table of Contents
- Preface
- 1 - Drive Start-Up
- 2 - Programming and Parameters
- 3 - Troubleshooting
- Drive Status
- Faults and Alarms
- Manually Clear Faults
- Fault and Alarm Descriptions
- Fault Subcodes
- Clear Alarms
- Common Drive Symptoms and Corrective Actions
- Drive does not Start from Start or Run Inputs Wired to the Terminal Block
- Drive does not Start from HIM
- Drive does not Respond to Changes in Speed Command
- Motor and/or Drive will not Accelerate to Commanded Speed
- Motor Operation is Unstable
- Drive will not Reverse Motor Direction
- Stopping the Drive Results in a Decel Inhibit Fault
- Technical Support Options
- A - HIM Overview
- B - Application Notes
- C - History of Changes
- Index
- Back Cover
28 Rockwell Automation Publication 20C-PM001F-EN-P - March 2012
Chapter 2 Programming and Parameters
SPEED COMMAND
Process PI
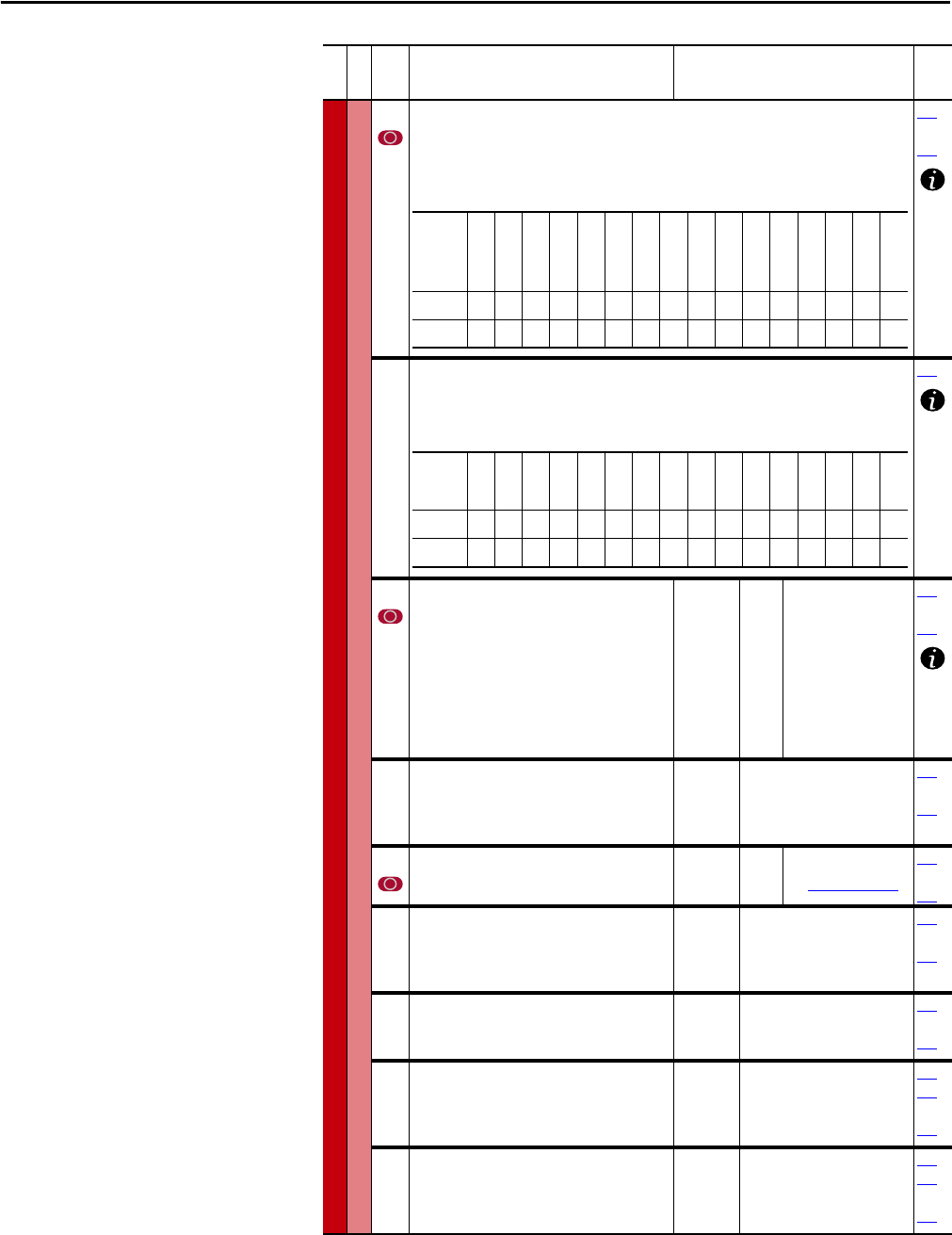
124 [PI Configuration]
Sets configuration of the PI regulator.
Note: Added bit 9 “% of Ref” for firmware revision 3.001.
1 = Enabled
0 = Disabled
124
thru
138
125 [PI Control]
Controls the PI regulator.
1 = Enabled
0 = Disabled
080
126 [PI Reference Sel]
Selects the source of the PI reference.
Default:
Options:
0
0
1
2
3-8
9
10
11-17
18-22
“PI Setpoint”
“PI Setpoint”
“Analog In 1”
“Analog In 2”
“Reserved”
“MOP Level”
“Master Ref”
“Preset Spd1-7”
“DPI Port 1-5”
124
thru
138
127 [PI Setpoint]
Provides an internal fixed value for process
setpoint when [PI Reference Sel] is set to “PI
Setpoint.”
Default:
Min/Max:
Units:
50.0%
–/+100.0% of Maximum
Process Value
0.1%
124
thru
138
128 [PI Feedback Sel]
Selects the source of the PI feedback.
Default:
Options:
2“Analog In 2”
See [PI Reference Sel]
.
124
thru
138
129 [PI Integral Time]
Time required for the integral component to reach
100% of [PI Error Meter]. Not functional when the
PI Hold bit of [PI Control] = “1” (enabled).
Default:
Min/Max:
Units:
2.0 Secs
0.00/100.00 Secs
0.01 Secs
124
thru
138
130 [PI Prop Gain]
Sets the value for the PI proportional component.
PI Error x PI Prop Gain = PI Output
Default:
Min/Max:
Units:
1.0
0.00/100.00
0.01
124
thru
138
131 [PI Lower Limit]
Sets the lower limit of the PI output.
Default:
Min/Max:
Units:
–[Maximum Freq]
100%
–/+800.0%
0.1%
079
124
thru
138
132 [PI Upper Limit]
Sets the upper limit of the PI output.
Default:
Min/Max:
Units:
+[Maximum Freq]
100%
–/+800.0%
0.1%
079
124
thru
138
File
Group
No.
Parameter Name & Description Values
Related
Name
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
% of Ref
Reserved
Anti-Wind Up
Stop Mode
Feedbak Sqrt
Zero Clamp
Ramp Ref
Preload Mode
Invert Error
Excl Mode
Defaultxxxxxx0x00000000
Bit 1514131211109876543210
Name
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
PI Reset
PI Hold
PI Enable
Defaultxxxxxxxxxxxxx000
Bit 1514131211109876543210