
Owner's manual










Publication 2098-RM001C-EN-P – August 2002
Programming Reference 2-73
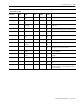
136 Get Peak -Position
Error
DINT 4 Cnts The negative peak Position Error.
137 Get Peak +Position
Error
DINT 4 Cnts The positive peak Position Error.
138 Get Velocity
Command
DINT 4 Cnts /
Sec
The commanded motor velocity which is input to the
velocity loop.
139 Get Velocity Error DINT 4 Cnts /
Sec
The difference between command motor velocity
(Motor Velocity) and actual velocity (Motor Velocity).
140 Get Motor Velocity DINT 4 Cnts /
Sec
Actual motor velocity (filtered value).
141 Get Analog Current
Limit
INT 2 Amps /
128
The current limit specified by the analog current limit
input.
142 Get Average Current INT 2 Amps /
128
The average value of the Current Command.
143 Get Current
Command
INT 2 Amps /
128
The commanded current.
144 Get Current Feedback INT 2 Amps /
128
The actual current in the motor producing torque in a
rotary motor or force in a linear motor.
145 Get Negative Peak
Current
INT 2 Amps /
128
The negative peak, as recorded by the peak
detection algorithm.
146 Get Positive Peak
Current
INT 2 Amps /
128
The positive peak, as recorded by the peak detection
algorithm.
147 Get Drive Temp UINT 2 % The drive temperature as a percentage of the trip
point.
148 Get Motor Temp UINT 2 % /
128
The motor temperature as a percentage of the trip
point.
149 Get Encoder Temp USINT 1 Deg C The encoder temperature if Parameter 191, Auto
Motor Identification is set to Enable and a smart
encoder is detected.
Parameter Object,
Instances ID = 1- 996
Parameter
Instance
Access
Rule
Parameter
Name
Data
Type
Data Size
(Bytes)
Units /
Scale
Description