
Owner's manual










Publication 2098-RM001C-EN-P – August 2002
2-72 Programming Reference
125 Get Tuning Status BYTE 1 Status bits for the autotune procedure.
Bit 0 = Autotune Done
Bit 1 = Reserved
Bit 2 = Reserved
Bit 3 = Autotune Speed Too Low
Bit 4 = Autotune Timeout
Bit 5 = Distance Limit Reached
Bit 6 = Autotune Failed
126 Get Digital Input
States
WORD 2 The present state of the digital hardware inputs.
Bit 0 = Input 1 State
Bit 1 = Input 2 State
Bit 2 = Input 3 State
Bit 3 = Input 4 State
Bit 4 = Input 5 State
Bit 5 = Input 6 State
Bit 6 = Input 7 State
Bit 7 = Input 8 State
127 Get Digital Output
States
WORD 2 The present state of the digital hardware outputs.
Bit 0 = Output 1 State
Bit 1 = Output 2 State
Bit 2 = Output 3 State
Bit 3 = Output 4 State
Bit 4 = Relay State
128 Get Encoder Signals WORD 2 The preset state of the encoder signals.
Bit 0 = Auxiliary Encoder Z
Bit 1 = Auxiliary Encoder B
Bit 2 = Auxiliary Encoder A
Bit 3 = Motor Encoder S3
Bit 4 = Motor Encoder S2
Bit 5 = Motor Encoder S1
Bit 6 = Motor Encoder Z
Bit 7 = Motor Encoder B
Bit 8 = Motor Encoder A
Bit 9 = Motor Thermostat
Bit 10 = Negative Overtravel
Bit 11 = Positive Overtravel
129 Get Analog Command
Input Value
INT 2 mV The Analog Command Input value before any the
scale and offset are applied.
130 Get Analog Output
Value
INT 2 mV The Analog Output value.
131 Get DC Bus Voltage UINT 2 Volts The measured voltage of the DC bus.
132 Get Position
Command
DINT 4 Cnts The commanded motor position which is input to the
position loop.
133 Get Position Error DINT 4 Cnts The difference between commanded motor position
(Position Command) and actual motor position
(Motor Position).
134 Get Motor Position DINT 4 Cnts Actual motor position.
135 Get Auxiliary Encoder
Position
DINT 4 Cnts Auxiliary encoder position.
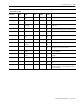
Parameter Object,
Instances ID = 1- 996
Parameter
Instance
Access
Rule
Parameter
Name
Data
Type
Data Size
(Bytes)
Units /
Scale
Description