
Owner's manual






Publication 2098-RM001C-EN-P – August 2002
Programming Reference 2-27
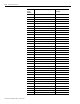
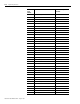
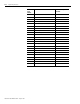
29 Velocity Loop D_Gain 55
30 Position Loop Kp Gain 56
31 Position Loop Ki Gain 57
32 Position Loop Kd Gain 58
33 Position Loop Kff Gain 59
34 Position Loop Ki Zone 60
35 Low Pass Filter 61
36 Low Pass Bandwidth 62
37 Digital Output Override 95
38 Override Analog Output 101
39 Analog Output Override 102
40 User Current Fault 103
41 User Velocity Limit 104
42 User Velocity Fault 105
43 Velocity Error Limit 106
44 Velocity Error Time 107
45 Position Error Limit 108
46 Position Error Time 109
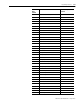
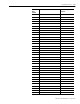
47 Slew Enable 262
48 Slew Limit 263
49 Master Gear Count 0 264
50 Motor Gear Count 0 265
51 Master Gear Count 1 266
52 Motor Gear Count 1 267
53 Master Gear Count 2 268
54 Motor Gear Count 2 269
55 Master Gear Count 3 270
56 Motor Gear Count 3 271
57 Master Gear Count 4 272
58 Motor Gear Count 4 273
59 Master Gear Count 5 274
60 Motor Gear Count 5 275
61 Master Gear Count 6 276
62 Motor Gear Count 6 277
63 Master Gear Count 7 278
64 Motor Gear Count 7 279
Command
Data
Pointer
Name Parameter Object
Instance