
Design Guide User guide










Table Of Contents
- Front Cover - Kinetix 2000 Drive Systems Design Guide
- Introduction
- Determine What You Need
- Kinetix 2000 System Examples
- 2090-Series Motor/Actuator Cables Overview
- Kinetix 2000 Drives with MPL
- Kinetix 2000 Drives with MPM
- Kinetix 2000 Drives with MPF
- Kinetix 2000 Drives with MPS
- Kinetix 2000 Drives with TLY
- Bulletin TLY Motor Cable Combinations
- Bulletin TLY (non-brake) Motor Performance Specifications with Kinetix 2000 Drives
- Bulletin TLY (brake) Motor Performance Specifications with Kinetix 2000 Drives
- Kinetix 2000 Drives/TLY-AxxxP-B (absolute high-resolution) Motor Curves
- Kinetix 2000 Drives/TLY-AxxxT-H (incremental) Motor Curves
- Kinetix 2000 Drives/TLY-Axxxx-x Motor Curves
- Kinetix 2000 Drives with MPAS
- Kinetix 2000 Drives with MPAR
- Kinetix 2000 Drives with MPAI
- Kinetix 2000 Drives with TLAR
- Kinetix 2000 Drives with LDC-Series
- Kinetix 2000 Drives with LDL-Series
- Additional Resources
- Back Cover
34 Rockwell Automation Publication GMC-RM006A-EN-P - September 2011
Kinetix 2000 Drive Systems
Kinetix 2000 Drives with TL-Series Electric Cylinders
This section provides system combination information for the Kinetix 2000 (200V class) drives when matched with
TL-Series (200Vclass) electric cylinders. Included are power/brake and feedback cable catalog numbers, system
performance specifications, and the optimum force/velocity curves.
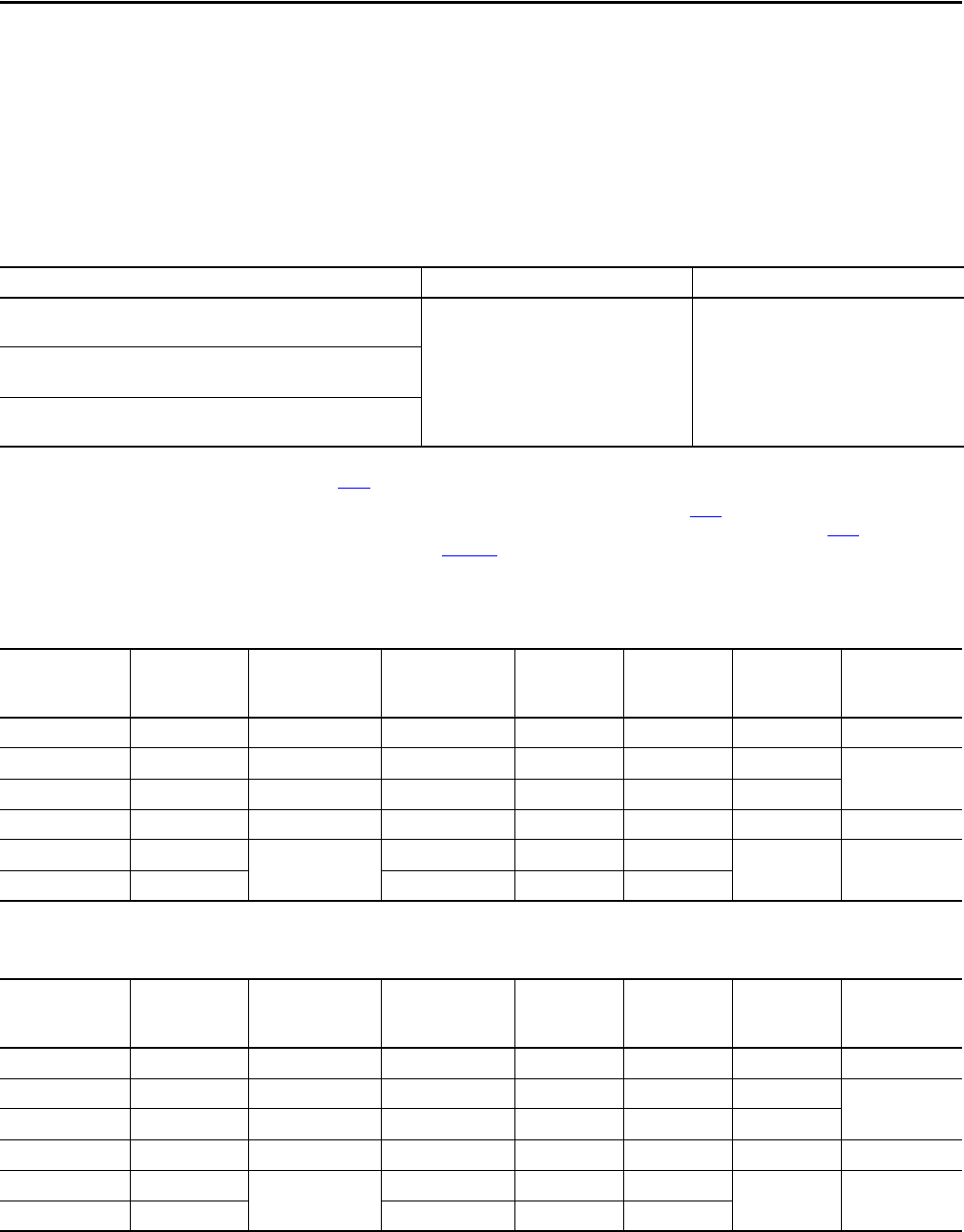
Electric Cylinder Cable Combinations
For cable configuration illustrations and feature descriptions, by catalog number, refer to 2090-Series Motor/Actuator Cables Overview beginning on page 7.
Motor-end connector kits, and panel-mounted breakout components (drive end), are available for motor power/brake and feedback cables. Refer to Optional Drive Accessories on page 4
.
Cable length xx is in meters. Refer to the Kinetix Motion Accessories Technical Data, publication GMC-TD004
, for standard cable lengths.
Electric Cylinder (non-brake) Performance Specifications with Kinetix 2000 Drives
Electric Cylinder (brake) Performance Specifications with Kinetix 2000 Drives
Performance specification data and curves reflect nominal system performance of a typical system with motor at 40 °C (104 °F) and drive at 50 °C (122 °F) ambient and rated line voltage. For additional
information on ambient and line conditions, refer to Motion Analyzer software, version 4.7 or later.
Electric Cylinder Motor Power/Brake Cable Motor Feedback Cable
(1)
(1) TLY-Axxxx-B motors with 17-bit high-resolution encoder feedback (mounted to the electric cylinder) require the 2090-CFBM6DF-CBAAxx flying-lead feedback cable and 2090-K2CK-D15M connector kit
with 2090-DA-BAT2 battery. Refer to Required Drive Accessories on page 3
.
TLAR-A1xxxB
TLAR-A1xxxE
2090-CPWM6DF-16AAxx (standard, non-flex)
(without brake)
2090-CPBM6DF-16AAxx (standard, non-flex)
(with brake)
2090-CFBM6DF-CBAAxx (standard, non-flex)
Absolute High-resolution Feedback
TLAR-A2xxxC
TLAR-A2xxxF
TLAR-A3xxxE
TLAR-A3xxxH
Electric Cylinder
Speed, max
mm/s (in/s)
System Continuous
Stall Current
Amps 0-pk
System Continuous
Stall Force
N (lb)
System Peak
Stall Current
Amps 0-pk
System Peak
Stall Force
N (lb)
Rated Output
kW
Kinetix 2000
200V-class Drives
TLAR-A1xxxB 150 1.36 240 (53.9) 1.79 300 (67.4) 0.036 2093-AMP2
TLAR-A1xxxE 500 2.59 280 (62.9) 3.03 350 (78.7) 0.140
2093-AMP5
TLAR-A2xxxC 250 3.03 420 (94.4) 3.41 525 (118) 0.105
TLAR-A2xxxF 640 5.50 640 (144) 7.25 800 (180) 0.350 2093-AM01
TLAR-A3xxxE500
10.0
2000 (450) 12.9 2500 (562)
0.930 2093-AM02
TLAR-A3xxxH 1000 1300 (292) 17.2 1625 (365)
Electric Cylinder
Speed, max
mm/s (in/s)
System Continuous
Stall Current
Amps 0-pk
System Continuous
Stall Force
N (lb)
System Peak
Stall Current
Amps 0-pk
System Peak
Stall Force
N (lb)
Rated Output
kW
Kinetix 2000
200V-class Drives
TLAR-A1xxxB 150 1.18 240 (53.9) 1.79 300 (67.4) 0.036 2093-AMP2
TLAR-A1xxxE 500 2.24 280 (62.9) 3.03 350 (78.7) 0.140
2093-AMP5
TLAR-A2xxxC 250 2.68 420 (94.4) 3.41 525 (118) 0.105
TLAR-A2xxxF 640 4.95 640 (144) 7.25 800 (180) 0.350 2093-AM01
TLAR-A3xxx
E500
10.0
2000 (450) 12.9 2500 (562)
0.930 2093-AM02
TLAR-A3xxxH 1000 1300 (292) 17.2 1625 (365)