
Design Guide User guide










Table Of Contents
- Front Cover - Kinetix 2000 Drive Systems Design Guide
- Introduction
- Determine What You Need
- Kinetix 2000 System Examples
- 2090-Series Motor/Actuator Cables Overview
- Kinetix 2000 Drives with MPL
- Kinetix 2000 Drives with MPM
- Kinetix 2000 Drives with MPF
- Kinetix 2000 Drives with MPS
- Kinetix 2000 Drives with TLY
- Bulletin TLY Motor Cable Combinations
- Bulletin TLY (non-brake) Motor Performance Specifications with Kinetix 2000 Drives
- Bulletin TLY (brake) Motor Performance Specifications with Kinetix 2000 Drives
- Kinetix 2000 Drives/TLY-AxxxP-B (absolute high-resolution) Motor Curves
- Kinetix 2000 Drives/TLY-AxxxT-H (incremental) Motor Curves
- Kinetix 2000 Drives/TLY-Axxxx-x Motor Curves
- Kinetix 2000 Drives with MPAS
- Kinetix 2000 Drives with MPAR
- Kinetix 2000 Drives with MPAI
- Kinetix 2000 Drives with TLAR
- Kinetix 2000 Drives with LDC-Series
- Kinetix 2000 Drives with LDL-Series
- Additional Resources
- Back Cover
Rockwell Automation Publication GMC-RM006A-EN-P - September 2011 13
Kinetix 2000 Drive Systems
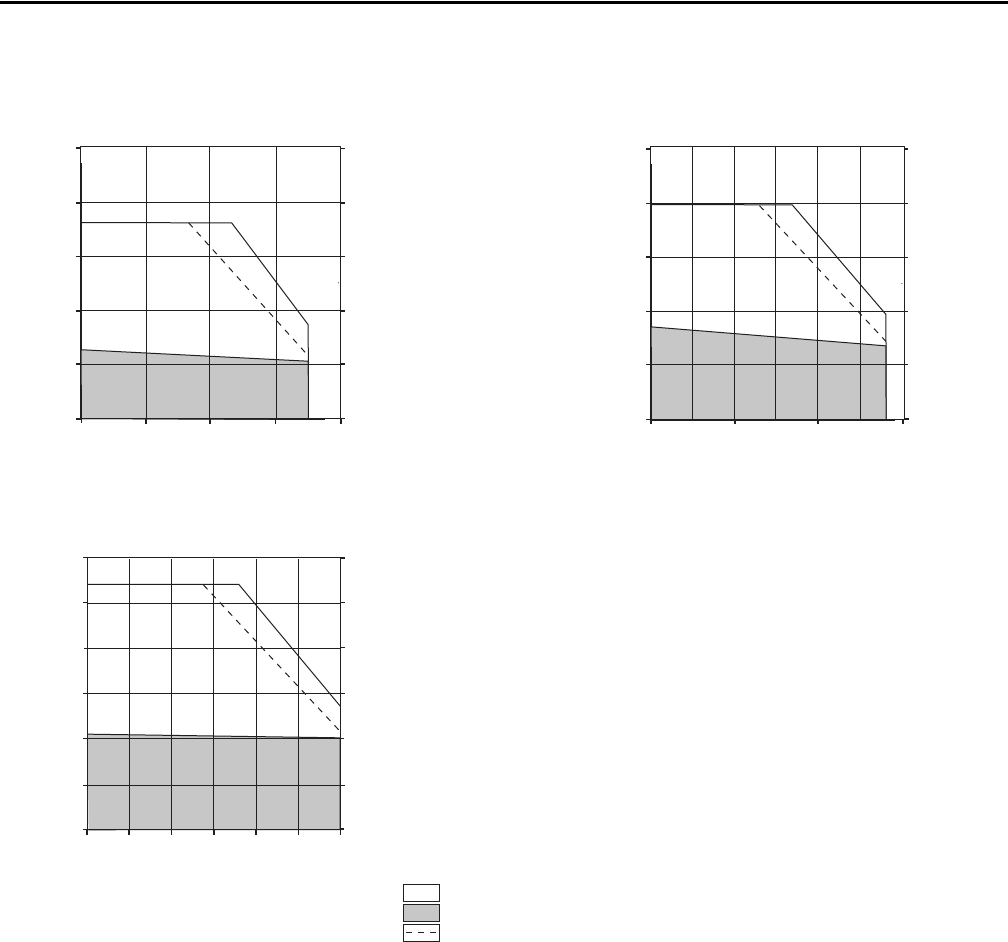
Kinetix 2000 Drives with MP-Series Low Inertia Motor Curves (continued)
Torque
(N•m)
Torque
(lb•in)
0
0
5
10
15
25
20
44.2
88.5
133
177
221
Speed (rpm)
0
2000
4000
30001000
2093-AM02 and MPL-A430H
Torque
(N•m)
Torque
(lb•in)
0
0
5
10
15
25
20
44.2
88.5
133
177
221
Speed (rpm)
30001000
2000
0
2093-AM02 and MPL-A4530F
Torque
(N•m)
Torque
(lb•in)
2093-AM02 and MPL-A4540C
30
25
20
15
10
5
0
265
221
177
133
88.5
44.2
0
Speed (rpm)
0 15001000500 1250750250
= Intermittent operating region (three-phase input)
= Continuous operating region
= Drive operation (single-phase input)