
User Manual Owner's manual










Table Of Contents
- 1772-6.5.8, Mini-PLC-2/02, -2/16, -2/17 Processor, User Manual
- Important User Information
- Summary of Changes
- Table of Contents
- 1 - Using This Manual
- 2 - Fundamentals of a Programmable Controller
- 3 - Hardware Features
- 4 - Installing Your Programmable Controller
- 5 - Starting Your Processor
- 6 - Maintaining and Troubleshooting Your Processor
- 7 - Memory Organization
- 8 - Scan Theory
- 9 - Relay-Like Instructions
- 10 - Program Control Instructions
- 11 - Timers and Counters
- 12 - Data Manipulation and Compare Instructions
- 13 - Three-Digit Math Instructions
- 14 - EAF Math Instructions
- 15 - EAF Log, Trig, and FIFO Instructions
- 16 - EAF Process Control Instructions
- 17 - Jump Instructions and Subroutines
- 18 - Block Transfer
- 19 - Data Transfer Instructions
- 20 - Bit Shift Registers
- 21 - Sequencers
- 22 - Selectable Timer Interrupts
- 23 - Report Generation
- 24 - Program Editing
- 25 - Programming Techniques
- 26 - Program Troubleshooting
- A - Specifications
- B - Processor Comparison Chart
- C - Number Systems
- D - Glossary
- E - Quick Reference
- Index
- Back Cover
EAF
Process Control Instructions
Chapter 16
16-2
PID
Features
The PID EAF instruction provides the following features:
Selectable dependent or independent gain PID equations
Manual to automatic mode with bumpless transfer
Derivative term calculates from PV or error
Process variable and setpoint scaled to engineering units
Output alarms
Output limiting with anti-reset windup
Zero crossing dead band
Feedforward or output biasing
Direct or reverse control action
Concepts
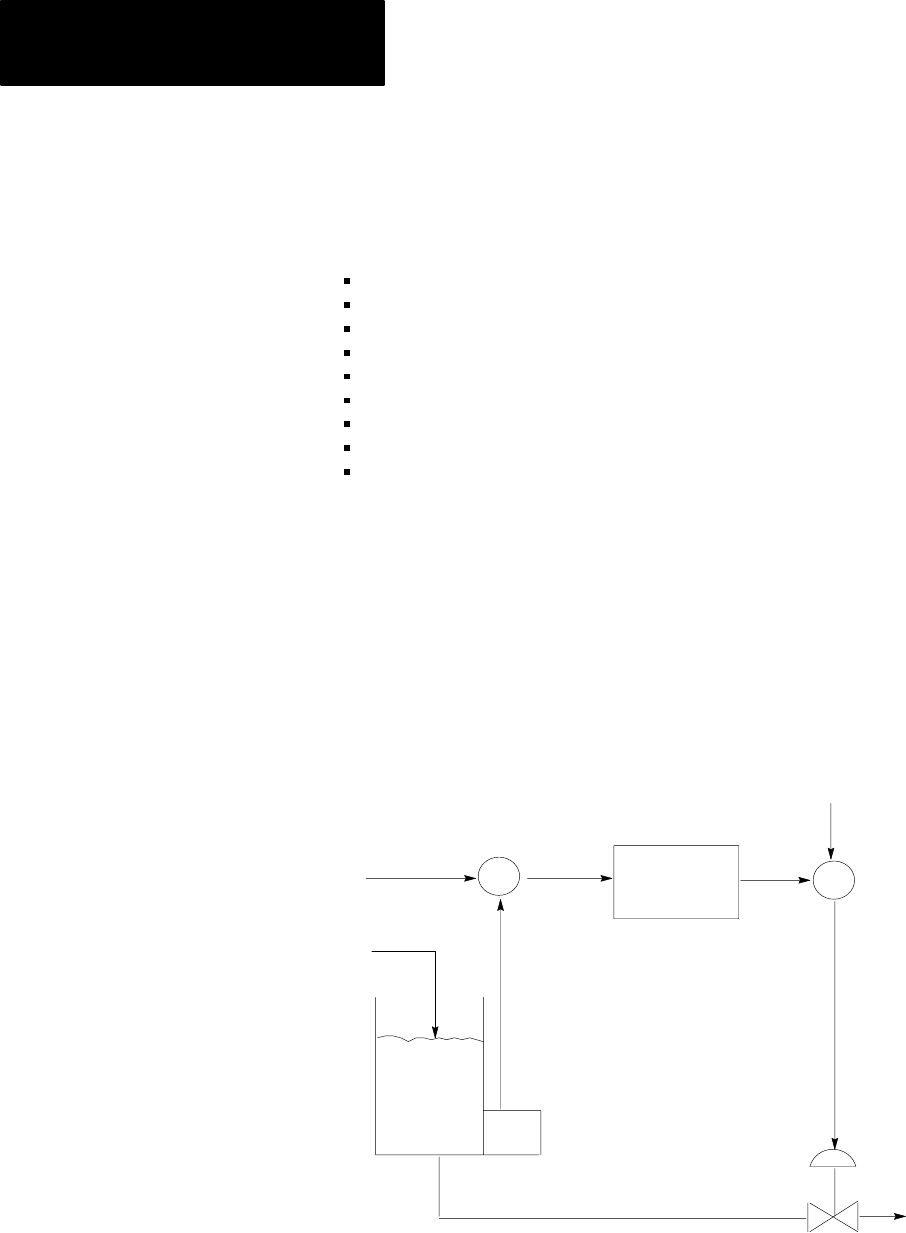
PID Closed Loop Control (Figure 16.2) holds a physical quantity such as
pressure, temperature, or flow rate at a desired value (set point).
Figure 16.2
Loop
Control With A PID Controller
PID
Equation
FFWD
or
Bias
Σ
Set Point Error
Flow
Rate
Process
Variable
Level
Detector
Control
Output
Control
Valve
10372-I
Σ