
Manual










Heavy Duty Dynamic Braking
6
1336-5.64 — July, 2005
How to Select a Dynamic Brake
Module
Gather the following information:
• Power rating from motor nameplate in watts, kilowatts, or horsepower
• Speed rating from motor nameplate in rpm or rps (radians per second)
• Motor inertia and load inertia in kg-m
2
or lb-ft
2
• Gear ratio (GR) if a gear is present between the motor and load
• Motor shaft speed, torque, and power profile of the drive application
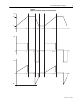
Figure 2 shows the speed, torque, and power profiles of the drive as a
function of time for a particular cyclic application that is periodic over t
4
seconds. The desired time to decelerate is known or calculable and is within
the drive performance limits. In Figure 2, the following variables are
defined:
ω(t) = Motor shaft speed in radians per second (rps)
N(t) = Motor shaft speed in Revolutions Per Minute (RPM)
T(t)
= Motor shaft torque in Newton-meters
1.0 lb-ft = 1.355818 N-m
P(t)
= Motor shaft power in watts
1.0 HP = 746 watts
ωb = Rated angular rotational speed
Rad/s
ωo = Angular rotational speed less than ω
b
(can equal 0)
Rad/s
-Pb
= Motor shaft peak regenerative power in watts
ω =
2πN
60