
Manual










LynxmotionSSC32UServoControllerBoard
ElectronicsGuide
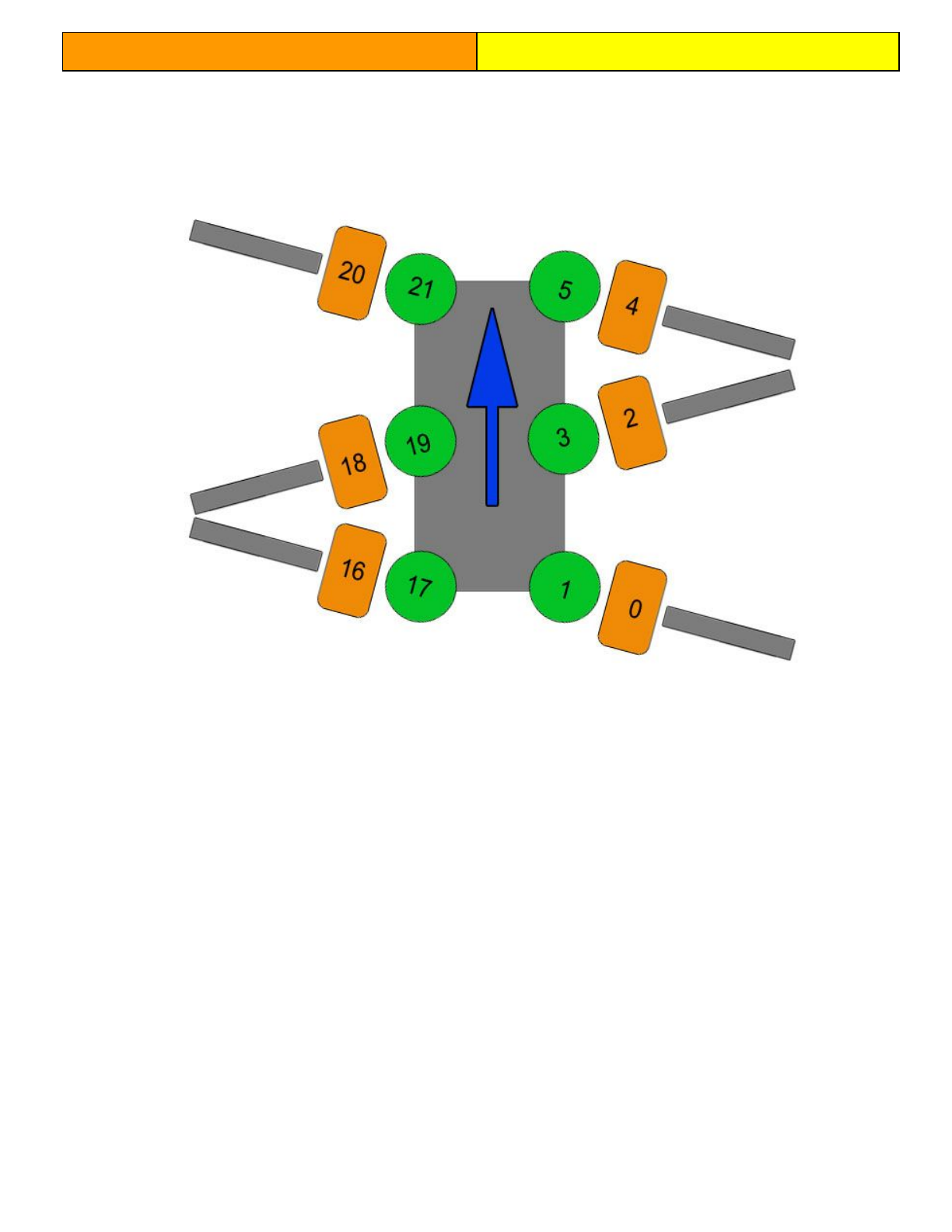
Position&MotionofFootDuringMotion
WalkingGaitConfiguration
LH<arg>,LM<arg>,LL<arg>
Setthevaluefortheverticalservosontheleftsideofthehexapod.LHsetsthehighvalue,i.e.
thepulsewidthtoraisethelegtoitsmaximumheight;LMsetsthemidvalue;andLLsetsthe
lowvalue.Thevalidrangefortheargumentsis500to2500uS.
RH<arg>,RM<arg>,RL<arg>
Setthevaluefortheverticalservosontherightsideofthehexapod.RHsetsthehighvalue,i.e.
thepulsewidthtoraisethelegtoitsmaximumheight;RMsetsthemidvalue;RLsetsthelow
value.Thevalidrangefortheargumentsis500to2500uS.
29