
Manual










LynxmotionSSC32UServoControllerBoard
ElectronicsGuide
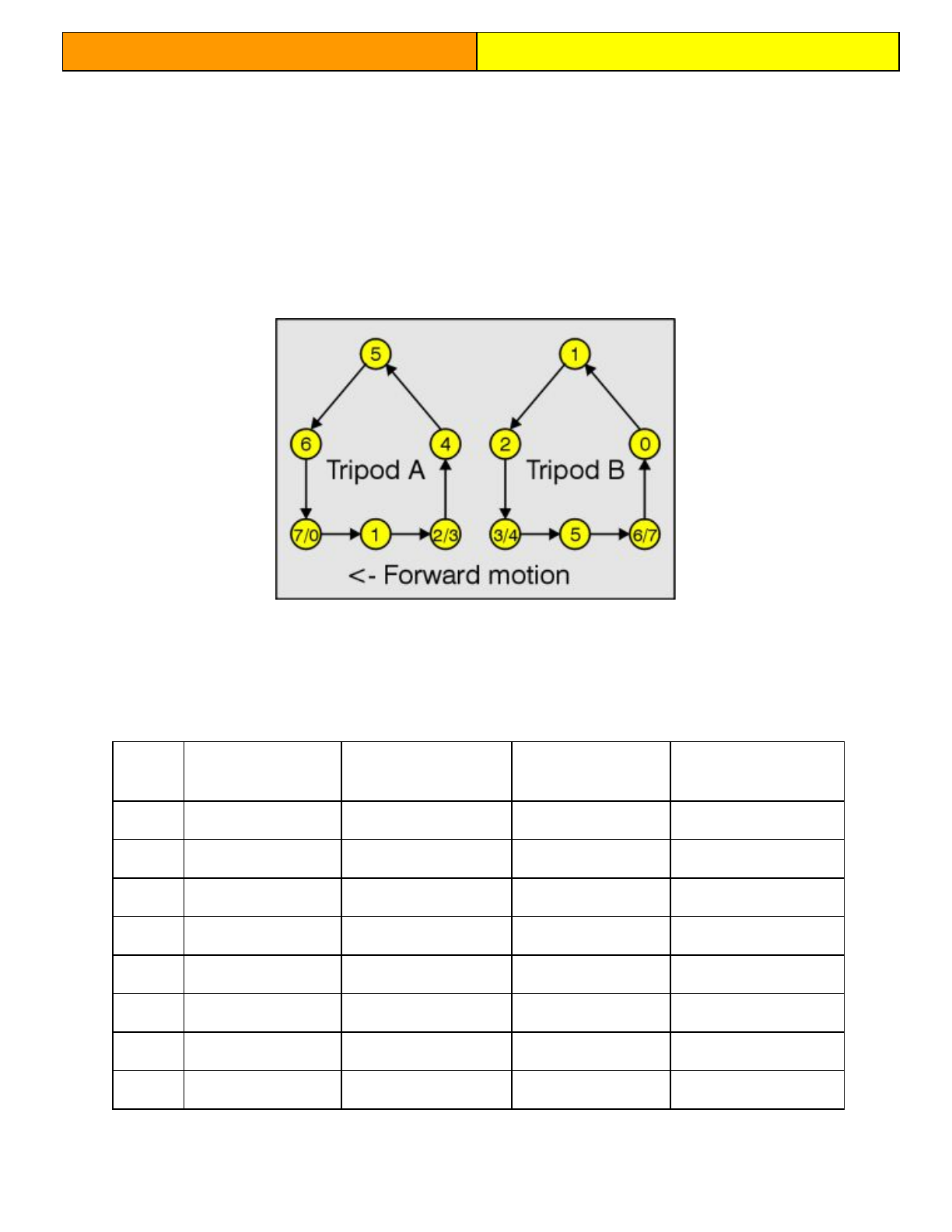
VisualPinAssignmentforHexapodSequencer
Thewalkingsequenceconsistsof8states,numbered07.Thegaitusesanalternatingtripod
gait(threelegsup,threelegsdown)towalking,withsixpossiblelocationsofeachfoot.
ThetripodsarelabeledTripodAandTripodB.
● TripodAconsistsof{LeftFrontLeg,LeftRearLeg,RightCenterLeg}
● TripodBconsistsof{LeftCenterLeg,RightFrontLeg,RightRearLeg}
Theyaredefinedbelow:
Viewofthelegfromthesideforeachgroupofthreelegs
Whilewalking,thelegspassthrough6points:(LowFront),(LowCenter),(LowRear),(Mid
Rear),(HighCenter),and(MidFront)."Center"referstothemidpointbetweentheFrontand
Rearpositions.
State
VerticalServo
(TripodA)
HorizontalServo
(TripodA)
VerticalServo
(TripodB)
HorizontalServo
(TripodB)
0
Low
FronttoCenter
MidtoHigh
ReartoCenter
1
Low
CentertoRear
HightoMid
CentertoFront
2
Low
Rear
MidtoLow
Front
3
LowtoMid
Rear
Low
Front
4
MidtoHigh
ReartoCenter
Low
FronttoCenter
5
HightoMid
CentertoFront
Low
CentertoRear
6
MidtoLow
Front
Low
Rear
7
Low
Front
LowtoMid
Rear
28