
Operation Manual










Kapitel 7-4
Robomow RL555, RL855, RL2000
Kante lernen
Nur für Bereiche ohne Ladestation:
Mittels der Option "Kante lernen" können Sie für das Kantenmähen einen
Abstand eingeben ("lehren"), der sich von Robomows Grundeinstellung
unterscheidet (1,5 bis 2 Runden um den Begrenzungsdraht). Sie können ihn
beispielsweise so einstellen, dass er lernt, es in einem Abstand von einer
vollen Runde auszuführen.
Dieser neu erlernte Abstand bleibt solange gültig, bis Kantenmähen erneut
gelernt wird oder Sie wieder die Grundeinstellung aufrufen.
) Positionieren Sie Robomow so, dass er beginnen kann, die Kante
zu mähen.
) Setzen Sie die Manuelle Steuerung in die Halterung zurück.
Justieren Sie die Steuerung und deren Kabel solange, bis sie mit dem
oberen Rand des Robomow bündig abschließt.
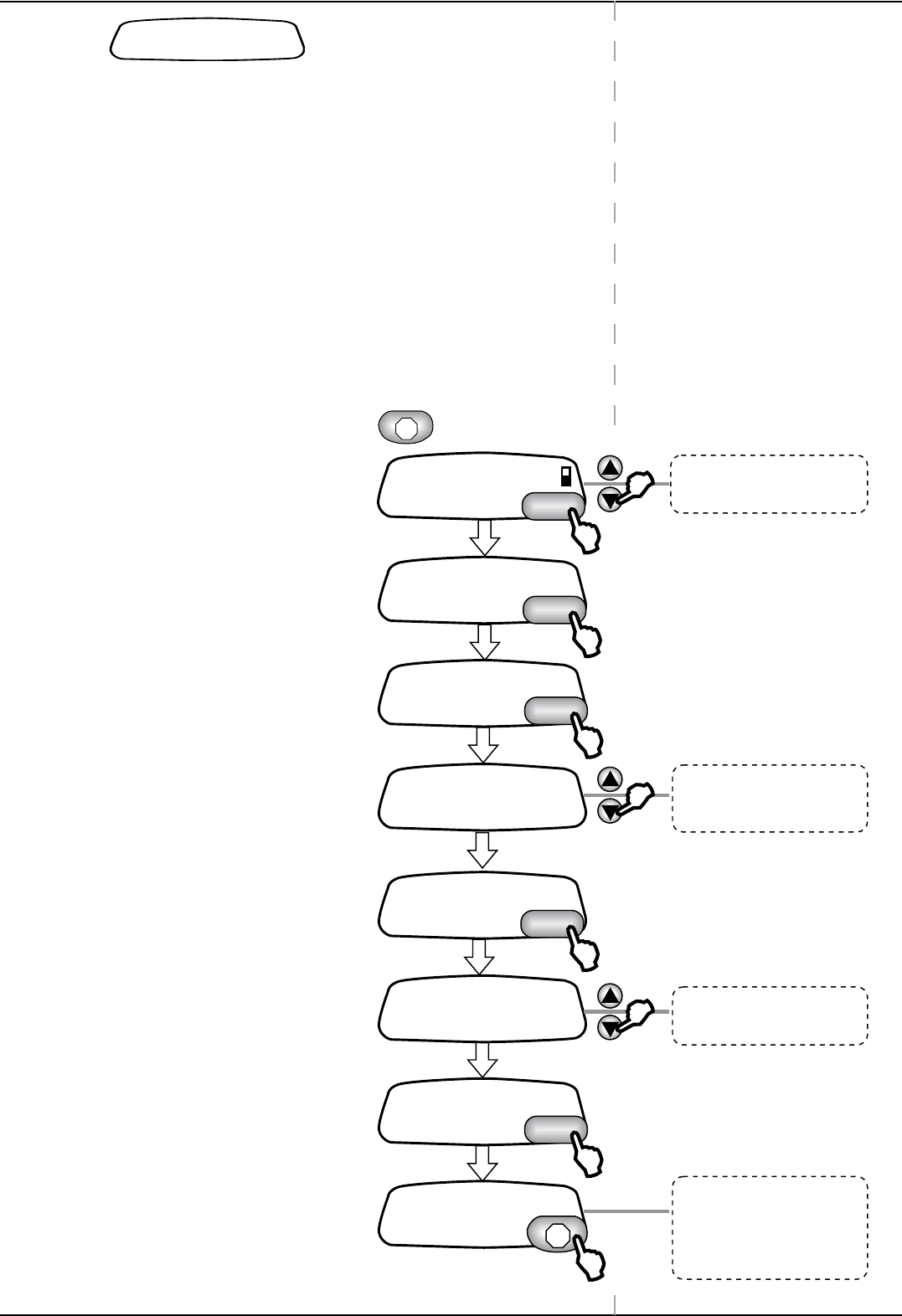
) Folgen Sie den nachstehend beschriebenen Schritten, um den
Vorgang "Kante lernen" zu beginnen.
) Robomow fährt um den Begrenzungsdraht herum. Folgen Sie
ihm und drücken Sie die Taste
, wenn der gewünschte
Abstand erreicht ist.