
Hardware manual










70
without having a contact with the authors, could very easy learn and test different properties of
PXMC. It would also allow for better understanding of different components and functions which
are or will be implemented in the library.
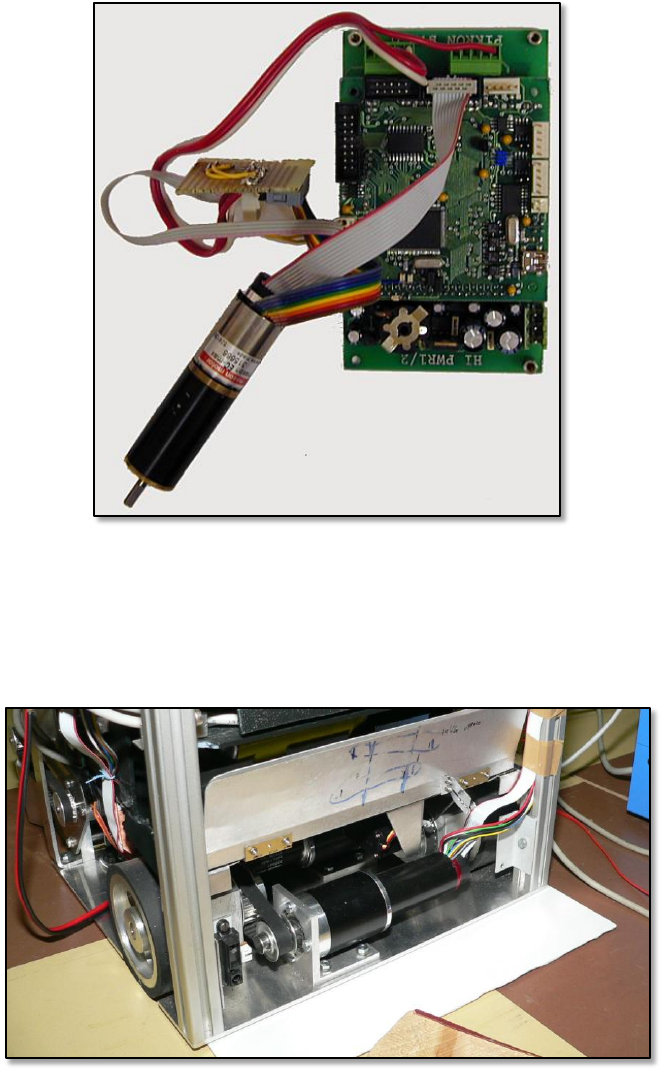
Fig. 8-1. The full configuration of hi_cpu2 board and
Connected brushless motor.
At the end I would like to underline, that the whole work which I made for this thesis brought me
really a lot of fun and new experience, which I hope to use in the future.
Fig. 8-2. Motor mounted in Eurobot Robot.