
Hardware manual










41
pxms_ptvang
This value is an angle between rotor and direction of magnetic field.
The optimal value for steeper motors is 0
o
and for brushless motors it
is 90
o
. It should be given using IRC units.
pxms_ptindx
This is an index to phase table arrays, which shows which element
from the phase table should be send to PWM output. If the flag
PXMS_PTI_b is set, then this value is automatically updated by PXMC
library according to measured input from IRC. If it's not, we can put
here our own values, estimated for example from hall sensors.
pxms_ptptr1
This is a pointer to the 1
st
phase table. The number of phases depends
on the motor. For example brushless motors used in Eurobot project
had 3 phase tables.
pxms_ptptr2
A/about this pointer is for the 2
nd
phase table.
pxms_ptptr3
A/about this pointer is for the 3
rd
phase table.
pxms_ptamp
This is the elements, called amplitude.
pxms_pwm1cor
It is a correction field for PWM1 generator
pxms_pwm2cor
It is a correction field for PWM2 generator
pxms_pwm3cor
It is a correction field for PWM3 generator
pxms_errno
This field keeps the number of last error which occurred when pxmc
was working.
pxms_cfg
This field has functionality to hold flags which describe the
configuration of a motor. See below description of possible flags.
pxms_ep
This field is used by generator and it keeps the information about the
end position of movement and like pxms_ap or pxms_as is shifted
using PXMC_SUBDIV. This value should be given in IRC units.
pxms_gen_st
This field describes the status of a generator.
pxms_gen_info
This is a table of 8 elements, which are used by/for trajectory
generators and computations.
pxms_hal
This field keeps last value read from hall sensor. Please see subsection
4.3.2 for more details.
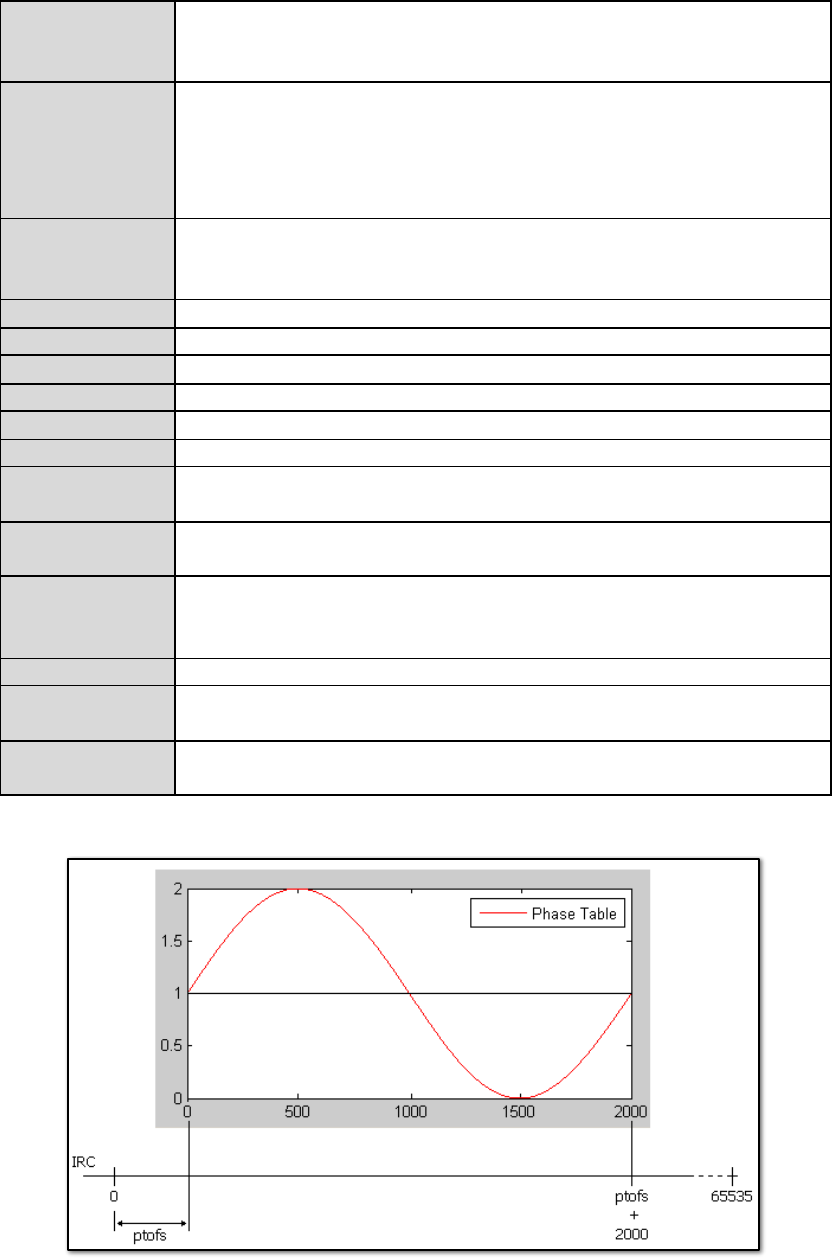
Fig. 5.3.3-3. Meaning of ptofs.