
Hardware manual










37
PXMS_CQF_b states whether the command queue is full or not. If it is full we can't give
any new command. This flag is still not implemented and you can find only its definition in
pxmc.h file. Maybe it is used by some other standalone library, but at the time when I
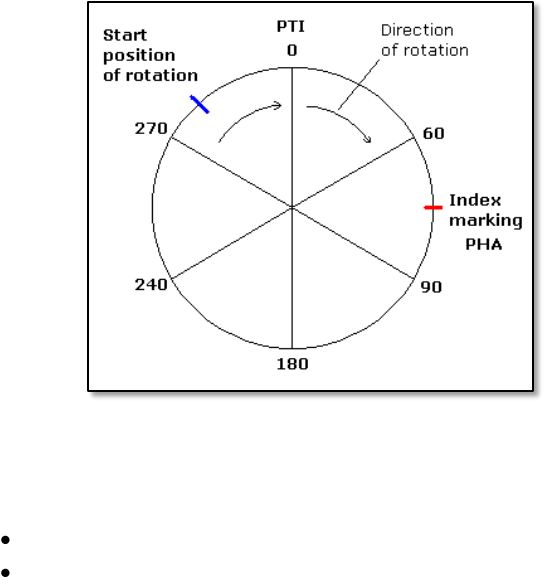
PXMS_PHA_b signalizes whether the phases in phase tables are aligned (flag is enabled)
or not (flag is disabled). In brushless motors this flag should be enabled after PXMS_PTI_b,
PXMS_PTI_b is responsible for switching on or off automatic updates of phase table index
(ptindx). The ptindx points in phase table(s) to the state of the PWM for the motor. This
flag should be enabled before PXMC_PHA_b and in the brushless motors we do it when
o hall sensors.
PXMS_ENO_b. This last flag is only used with brushless motors. It states that we are
interested only in output updates without calling controller.
Fig. 5.3.3-2. Meaning of PHA and PTI flags.
We can use all of above flags with given names using generally two functions:
pxmc_clear_flag - clear/disable given flag
pxmc_set_flag - set/enable given flag
It is important to mention, that if during compilation in a header file we define
PXMC_WITH_FLAGS_BYBITS_ONLY constant then the above two functions will work as
atomic.