
Hardware manual










31
platform. Secondly, developer must have at least some basic experience with motors and
microcontrollers. This is due to the fact, that there exist so many different motors, that it is
impossible to write support for all of them. Additionally, there will be always needed to make
some minor changes in the library's code, because on different hardware the connection will be
less or more different, because they depend mostly on the functionality of the board.
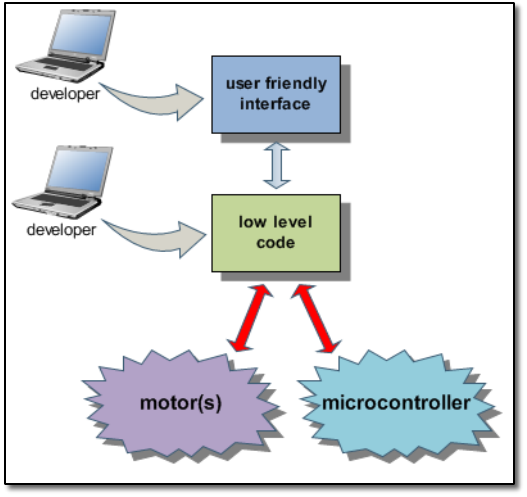
Next thing worth to understand is that the main purpose of the library was and still is to create
two layers. First should be a user friendly interface or API. Using this layer, user without deep
knowledge of hardware should be able to write pretty good and full functional application to
control all motors installed on the board. In this case, developer can have access only to small
number of functions and his only one concern is to set up properly all parameters in PXMC
structure. More about this structure I will write in next subsections. In general this layer will be
used in situation for example when we want to control our robot directly from the normal
computer using some program with graphical interface. The second layer is for more advanced
and experienced users. Here we can call all of the functions which are defined in PXMC library
and additionally create our own versions of them. This layer mostly will be used to write code to
support a new boards, microcontrollers and motors. Graphical representation of this description
was presented on the picture nr 5.1-2.
Fig. 5.1-2. Layers in PXMC library.
At the end I need to write one very important thing. PXMC library is still under development and
it is important to keep in mind, that some of the information included in this document can be
out of date it the moment when the reader reads it.