
Manual










Table Of Contents
- Ordering Information
- Features
- Description
- Architectural Overview
- General Purpose Register File
- ALU - Arithmetic Logic Unit
- ISP Flash Program Memory
- SRAM Data Memory
- Program and Data Addressing Modes
- Register Direct, Single Register Rd
- Register Direct, Two Registers Rd and Rr
- I/O Direct
- Data Direct
- Data Indirect with Displacement
- Data Indirect
- Data Indirect With Pre-Decrement
- Data Indirect With Post-Increment
- Constant Addressing Using the LPM and ELPM Instructions
- Direct Program Address, JMP and CALL
- Indirect Program Addressing, IJMP and ICALL
- Relative Program Addressing, RJMP and RCALL
- EEPROM Data Memory
- Memory Access Times and Instruction Execution Timing
- I/O Memory
- Reset and Interrupt Handling
- Reset Sources
- Power-On Reset
- External Reset
- Watchdog Reset
- MCU Status Register - MCUSR
- Interrupt Handling
- External Interrupt Mask Register - EIMSK
- External Interrupt Flag Register - EIFR
- External Interrupt Control Register - EICR
- Timer/Counter Interrupt Mask Register - TIMSK
- Timer/Counter Interrupt Flag Register - TIFR
- Interrupt Response Time
- Sleep Modes
- Timer/Counters
- Timer/Counter Prescalers
- 8-bit Timer/Counters T/C0 and T/C2
- Timer/Counter0 Control Register - TCCR0
- Timer/Counter2 Control Register - TCCR2
- Timer/Counter0 - TCNT0
- Timer/Counter2 - TCNT2
- Timer/Counter0 Output Compare Register - OCR0
- Timer/Counter2 Output Compare Register - OCR2
- Timer/Counter 0 and 2 in PWM mode
- Asynchronous Status Register - ASSR
- Asynchronous Operation of Timer/Counter0
- 16-bit Timer/Counter1
- Timer/Counter1 Control Register A - TCCR1A
- Timer/Counter1 Control Register B - TCCR1B
- Timer/Counter1 - TCNT1H and TCNT1L
- Timer/Counter1 Output Compare Register - OCR1AH and OCR1AL
- Timer/Counter1 Output Compare Register - OCR1BH and OCR1BL
- Timer/Counter1 Input Capture Register - ICR1H and ICR1L
- Timer/Counter1 in PWM mode
- Watchdog Timer
- EEPROM Read/Write Access
- Serial Peripheral Interface - SPI
- UART
- Analog Comparator
- Analog to Digital Converter
- Interface to external SRAM
- I/O-Ports
- Memory Programming
- Electrical Characteristics
- Typical characteristics
- Register Summary
- Instruction Set Summary (Continued)
ATmega603/103
100
Reading the Fuse and Lock Bits
The algorithm for reading the Fuse and Lock bits is as follows (refer to Programming the Flash for details on Command
loading):
1. A: Load Command ‘0000 0100’.
2. Set OE
to ‘0’, and BS to ‘0’. The status of the Fuse bits can now be read at DATA (‘0’ means programmed).
Bit 5 = SPIEN Fuse bit
Bit 3 = EESAVE Fuse bit
Bit 1 = SUT1 Fuse bit
Bit 0 = SUT0 Fuse bit
Set OE
to ‘0’, and BS to ‘1’. The status of the Lock bits can now be read at DATA (‘0’ means programmed).
Bit 2 = Lock Bit2
Bit 1 = Lock Bit1
3. Set OE
to ‘1’.
Reading the Signature Bytes
The algorithm for reading the Signature bytes is as follows (refer to Programming the Flash for details on Command and
Address loading):
1. A: Load Command ‘0000 1000’.
2. C: Load Address Low Byte ($00 - $02).
Set OE
to ‘0’, and BS to ‘0’. The selected Signature byte can now be read at DATA.
3. Set OE
to ‘1’.
Parallel Programming Characteristics
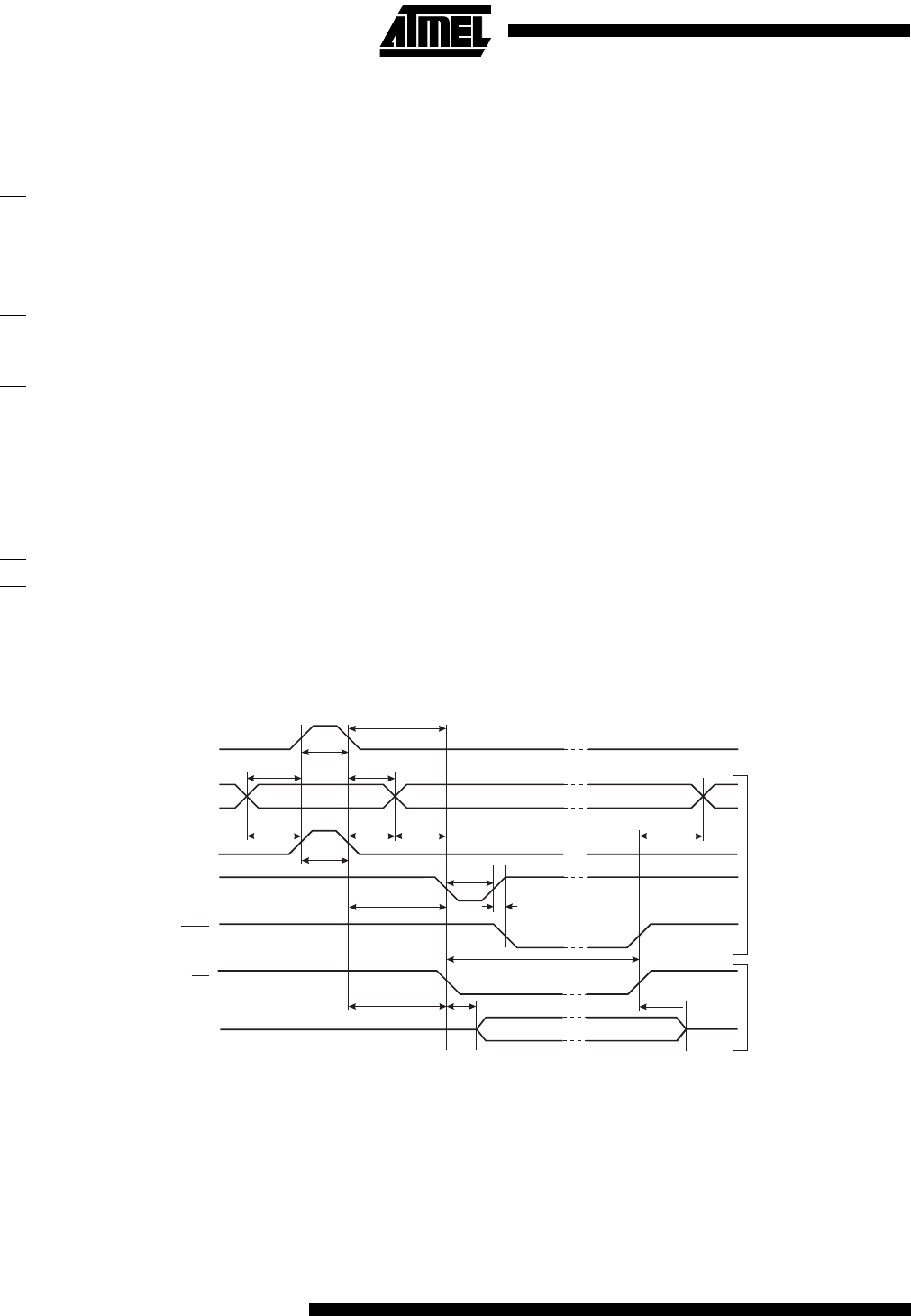
Figure 76. Parallel Programming Timing
Data & Contol
(DATA, XA0/1, BS1)
DATA
Write
Read
XTAL1
t
XHXL
t
WLWH
t
DVXH
t
XLOL
t
OLDV
t
XLDX
t
PLWL
t
WHRL
t
WLRH
WR
RDY/BSY
OE
PAGEL
t
PHPL
t
PLBX
t
BVXH
t
XLWL
t
RHBX
t
OHDZ
t
BVWL