
Data Sheet











the “Input state” variable is encoded, see Section 7.
5.3. Encoder input handling
This section explains the details of how the Tic reads quadrature encoder signals and converts them
to a target position or velocity.
The Tic does not support closed-loop control with encoder feedback. The Tic’s encoder
input is meant to be connected to a rotary encoder that is turned by hand to control
the stepper motor’s position or speed. If you have a stepper motor with an integrated
encoder, you should not try to connect the motor’s encoder to the Tic.
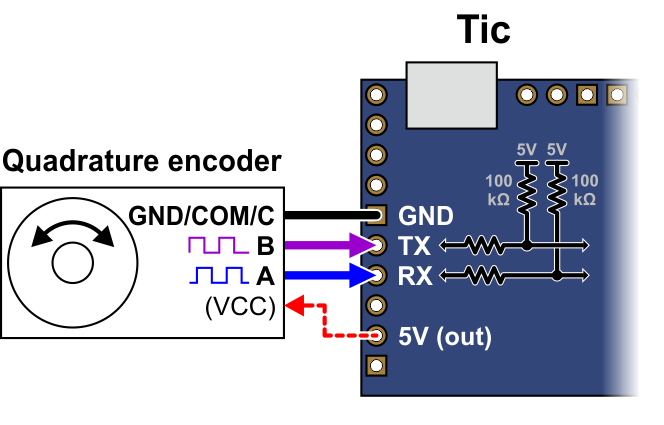
Encoder monitoring on the RX and TX pins
The Tic’s RX and TX pins are normally used for TTL serial communication, but they can be configured
as encoder inputs, and that is their default configuration when the Tic’s control mode is set to “Encoder
speed” or “Encoder position”. Each of these pins has a 100kΩ pull-up resistor and 440kΩ series
resistor, as shown in the diagram below.
The Tic expects to see a quadrature encoder signal like this on th RX and TX pins:
Tic Stepper Motor Controller User’s Guide © 2001–2018 Pololu Corporation
5. Details Page 66 of 150
{kind=link}