
Data Sheet











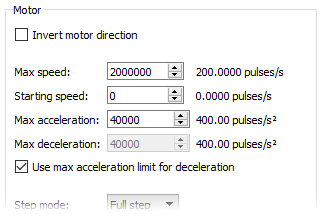
The Tic’s default motion settings.
the speed/acceleration/deceleration limits described later in this section.
In “Target velocity mode”, the Tic has a variable called “Target velocity” that specifies the velocity the
Tic should maintain. It will plan steps so that its current velocity reaches the target velocity, while
respecting the limits described later in this section. The target velocity can be set to any 32-bit signed
integer value, but if the absolute value of the “target velocity” is larger than the max speed, then the
Tic will never reach the target velocity.
In both of these modes, the Tic is designed to handle a frequently changing target. For instance, it is
OK if the target position changes while the Tic is traveling towards it, and the Tic will handle changes
like this seamlessly and quickly.
When the Tic’s control mode is Serial / I²C / USB, you can use the “Set target position” and “Set target
velocity” commands to set the target position and target velocity, respectively. These commands allow
you to change between “Target position mode” and “Target velocity mode” on the fly. In the other
control modes (besides STEP/DIR mode), you are limited to just one of those two modes (either target
position or target velocity), and the target is set automatically based on an input to the Tic.
Max speed
The Tic’s “Max speed” setting sets an upper
limit on how fast the Tic will try to drive the
stepper motor. See Section 4.3 for tips
about finding your stepper motor’s maximum
speed. The setting can be temporarily
overridden using the “Set max speed”
command, as described in Section 8.
The “Max speed” uses the Tic’s standard
speed units of 10,000 pulses per second,
and these are the units you must use when
entering it into the Tic software. For
convenience, the Tic Control Center displays
the maximum speed in units of pulses per second to the right its input box.
Starting speed
The Tic’s “Starting speed” setting is the maximum speed at which instant acceleration and deceleration
are allowed. For example, if you set the starting speed to 1,000,000 (100 pulses per second), then
the Tic will be able to instantly change from any velocity in the range of −1,000,000 to +1,000,000 to
any other velocity in that range. Setting the starting speed might allow you to make your system faster
since it will not waste time accelerating or decelerating through low speeds where it is not needed.
Tic Stepper Motor Controller User’s Guide © 2001–2018 Pololu Corporation
5. Details Page 58 of 150
{kind=link}