
Data Sheet











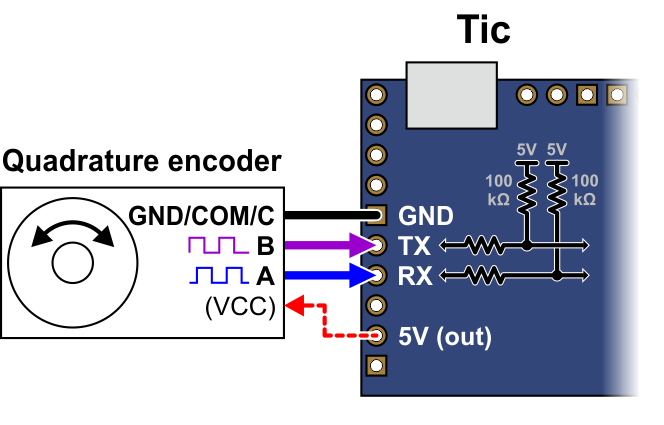
As a first step, you should turn off the power to your system and then connect your encoder to the Tic
as described above and shown in the diagram below. You can swap your A and B connections to flip
the direction of the encoder.
Now connect the Tic to your computer via USB. In the Tic Control Center software, set the Tic’s control
mode to “Encoder speed”. In the “Scaling” box, you should change the target maximum to be equal
to the maximum velocity that you want your motor to move in the forward/positive direction. Since you
already set the “Max speed” parameter in the “Motor” box (see Section 4.3), you could just copy that
value into the target maximum box. If you want your motor to go the same speed in both directions,
you should set the target minimum to the negative of the target maximum. Otherwise, you should set
the target minimum to be the lowest (most negative) velocity that you want your motor to have when
moving in the other direction. If you have previously changed the encoder prescaler setting, you should
change it back to its default value of 1. You should set the encoder postscaler to approximately one
hundredth of the “Max speed”. Click “Apply settings” to save these settings to the Tic.
Now connect motor power to start your system running. As you turn your encoder, you should see the
speed of your stepper motor changing proportionally: moving the encoder by one count should change
the target velocity by the value you entered for the encoder postscaler.
If your motor speed is not changing as you turn the encoder, you should look at the message at
the bottom of the Tic Control Center and also check for errors in Status tab. If there are any errors,
you should address them before continuing. If the system is still not working, you should look at the
“Encoder position” displayed in the Status tab, which is the raw count from your encoder. This number
is pinned to zero when motor power is off, so make sure you have connected your motor power to
the Tic. If you turn your encoder one way, this number should go up. If you turn it the other way, this
number should go down. If the “Encoder position” is not changing, or only changing by one count, it is
possible that your encoder is not wired correctly. Check all of your connections and soldering joints (if
Tic Stepper Motor Controller User’s Guide © 2001–2018 Pololu Corporation
4. Setting up the controller Page 53 of 150
{kind=link}