
Data Sheet











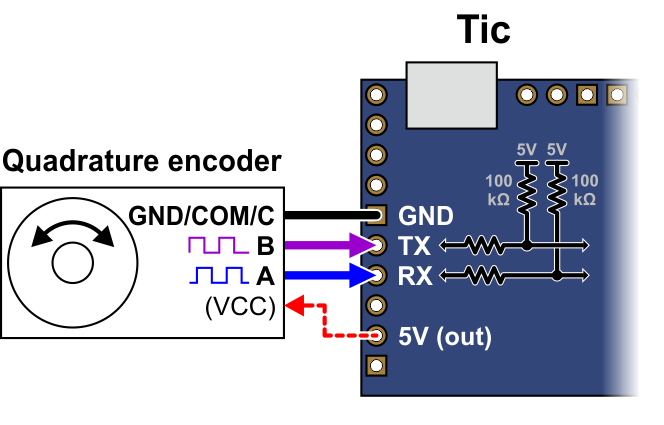
ground as the dial is rotated. The built-in pull-ups on the RX and TX pins make the signal high during
the times when the encoder outputs are floating, so there is no need for external pull-ups. Other kinds
of quadrature encoders might require power, and the 5V output on the Tic can be used to power them
if their documentation indicates they can operate at 5 V.
As a first step, you should turn off the power to your system and then connect your encoder to the Tic
as described above and shown in the diagram below. You can swap your A and B connections to flip
the direction of the encoder.
Now connect the Tic to your computer via USB. In the Tic Control Center software, set the Tic’s
control mode to “Encoder position”. If you have previously changed the target maximum and target
minimum, you should set them back to their default values of 200 and −200, respectively. If you have
previously changed the encoder prescaler or postscaler settings, you should change them both back
to their default value of 1. Also, make sure that the “Enable unbounded position control” setting for the
encoders is unchecked, as it is by default. Click “Apply settings” to save these settings to the Tic.
Now connect motor power to start your system running. As you turn your encoder, you should see
your stepper motor moving proportionally: one count from the encoder corresponds to one step from
the Tic.
If your motor is not moving as you turn the encoder, you should look at the message at the bottom
of the Tic Control Center and also check for errors in Status tab. If there are any errors, you should
address them before continuing. If the system is still not working, you should look at the “Encoder
position” displayed in the Status tab, which is the raw count from your encoder. This number is pinned
to zero when motor power is off, so make sure you have connected your motor power to the Tic. If you
turn your encoder one way, this number should go up. If you turn it the other way, this number should
go down. If the “Encoder position” is not changing, or only changing by one count, it is possible that
your encoder is not wired correctly. Check all of your connections and soldering joints (if applicable).
Tic Stepper Motor Controller User’s Guide © 2001–2018 Pololu Corporation
4. Setting up the controller Page 50 of 150
{kind=link}