
Data Sheet











mode to “Analog position” and click “Apply settings”. In the “Scaling” box, click “Learn…” to start the
Input Setup Wizard. The wizard will help you measure the neutral, maximum, and minimum positions
of your analog signal. When the wizard is finished, it will set five of the input scaling parameters
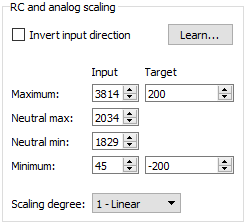
(input maximum, input neutral max, input neutral min, input minimum, and invert input direction)
appropriately so that the neutral analog signal gets mapped to a position of 0, the maximum analog
signal gets mapped to the target maximum, and the minimum analog signal gets mapped to the target
minimum. If you have previously changed the target maximum and target minimum, you should set
them back to their default values of 200 and -200, respectively. Click “Apply settings” to save these
settings to the Tic.
Example Tic scaling settings for analog
position control mode.
Now connect motor power and click “Resume” to start your system. If you move your input from the
neutral position to the maximum position, you should see the motor move by 200 steps. If you move
your input from the neutral position to the minimum position, you should see the motor move by 200
steps in the other direction.
You should make sure that the motor is moving in the correct direction. If it is not, you can check
the “Invert motor direction” checkbox to fix it. (You could also rewire the stepper motor to reverse the
current in one coil, but be sure to turn off the stepper motor power before doing that.)
Next, you should set the target maximum and minimum parameters in the “Scaling” box to set the
range of motion of your system. The target maximum must be zero or more, and the target minimum
must zero or less. These numbers correspond to microsteps if you have enabled microstepping.
Finally, check the “Scaling degree” parameter. The default setting is “1 – Linear”. If you want finer
control near the neutral point of your input and coarser control near the ends, you can change it to one
of the higher settings.
Tic Stepper Motor Controller User’s Guide © 2001–2018 Pololu Corporation
4. Setting up the controller Page 46 of 150
{kind=link}