
Data Sheet











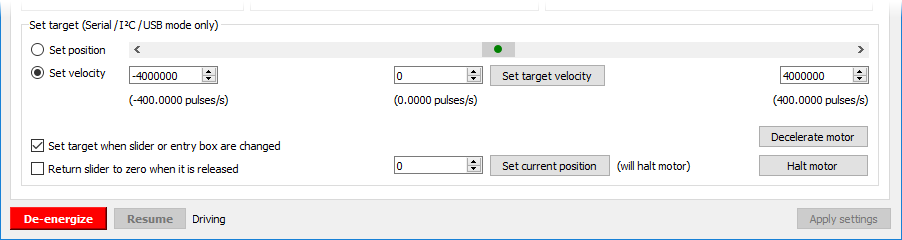
The “Set target” box in the Tic Control Center, with its range set to plus or minus 400 pulses
per second.
Try slowly dragging the scrollbar to both ends of its range. If your motor is able to reach the desired
speeds without pausing or skipping, you can increase the range of the scrollbar and try again. By
experimenting with the velocity scrollbar, you should be able to get an idea of what your motor can
do. Once you have done that, go back to the “Input and motor settings” tab and set the “Max speed”
appropriately.
You will probably have to adjust the “Max acceleration” parameter too. The Tic represents acceleration
and deceleration limits in units of pulses per second per 100 seconds. The acceleration and
deceleration limits specify how much the speed (in units of 10,000 pulses per second) is allowed to
rise or fall in one hundredth of a second (0.01 s or 10 ms). To set the acceleration limit, you might
consider how much time you want the Tic to spend accelerating from rest to full speed. If you want it
to take one second, then set the maximum acceleration to be one hundredth of the maximum speed.
Unlike a DC motor, which will accelerate on its own up to some max speed when a
voltage is applied, step rates must be gradually increased by the controller if you want to
achieve high maximum speeds. If you just jump abruptly to a high step rate, the inertia of
the stationary rotor will prevent it from being able to keep up with the rotating magnetic
field and it will get left behind; the result of this is that it will just sit there or vibrate in
place (or possibly even start moving backward). The Tic’s max acceleration parameter
limits how quickly the step rates will increase, which if set correctly, will give the rotor
time to keep up with the magnetic field as it spins faster and faster (up to some maximum
speed that is ultimately a function of your specific stepper motor as well as the current
limit setting, the supply voltage, and the load on the stepper motor output).
By default, the Tic’s deceleration limit is the same as its acceleration limit. If you want the deceleration
rate to be different, you can uncheck the “Use max acceleration limit for deceleration” box.
The “Starting speed” parameter specifies a speed below which deceleration and acceleration limits
are not respected. For example, if you set the starting speed to 1000000 (100 pulses per second),
Tic Stepper Motor Controller User’s Guide © 2001–2018 Pololu Corporation
4. Setting up the controller Page 30 of 150
{kind=link}