
Data Sheet











device # command data
0xAA 0x0E 0x14 0x03
The byte 0x14 is the “set step mode” command (0x94) with its most significant bit cleared.
The TicSerial class in our Tic Arduino library uses the compact protocol by default if the optional
deviceNumber argument is omitted, but you can make it use the Pololu protocol instead by providing
a device number. See the library documentation for more details.
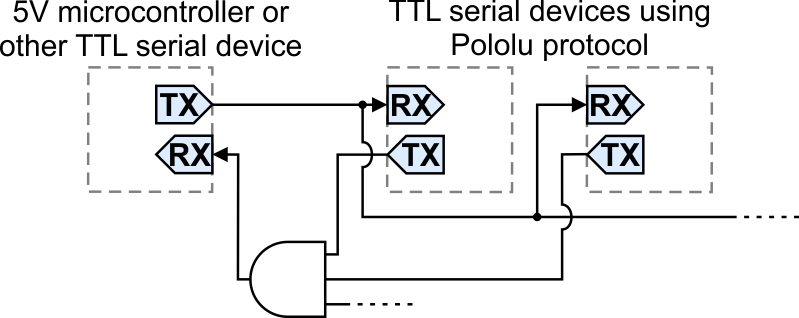
The diagram bellow shows how to connect multiple devices that support the Pololu protocol and
control them from the serial interface of a single 5V microcontroller or other serial device. The AND
gate is only needed if you want to read data back from more than one device.
Daisy-chaining multiple TTL serial devices that support the Pololu protocol for
control by a single microcontroller.
Cyclic Redundancy Check (CRC) Error Detection
For certain applications, verifying the integrity of the data you are sending and receiving can be very
important. Because of this, the Tic has optional 7-bit cyclic redundancy checking, which is similar to a
checksum but more robust as it can detect errors that would not affect a checksum, such as an extra
zero byte or bytes out of order.
Cyclic redundancy checking can be enabled by checking the “Enable CRC” checkbox in the "Input
and motor settings” tab of the Tic Control Center application. In CRC mode, the Tic expects an extra
byte to be added onto the end of every command packet. The most-significant bit of this byte must be
cleared, and the seven least-significant bits must be the 7-bit CRC for that packet. If this CRC byte is
incorrect, a CRC error will occur and the command will be ignored. The Tic does not append a CRC
byte to the data it transmits in response to serial commands.
A detailed account of how cyclic redundancy checking works is beyond the scope of this document,
Tic Stepper Motor Controller User’s Guide © 2001–2018 Pololu Corporation
9. Serial command encoding Page 138 of 150
{kind=link}