
Instruction Manual










Table Of Contents
- Contents
- Technical Support
- Preface
- Hardware Overview
- Software Utilities
- Setting up the Transducer Interface
- Installing the Transducer
- Contents
- Hazard Icon
- Road and Track Vehicles
- Road Simulator
- Analyzing SWIFT Data
- Maintenance
- Troubleshooting
- Assembly Drawings
Mx Data (Overturning Moment)
SWIFT 10 ATV Sensors Analyzing SWIFT Data
103
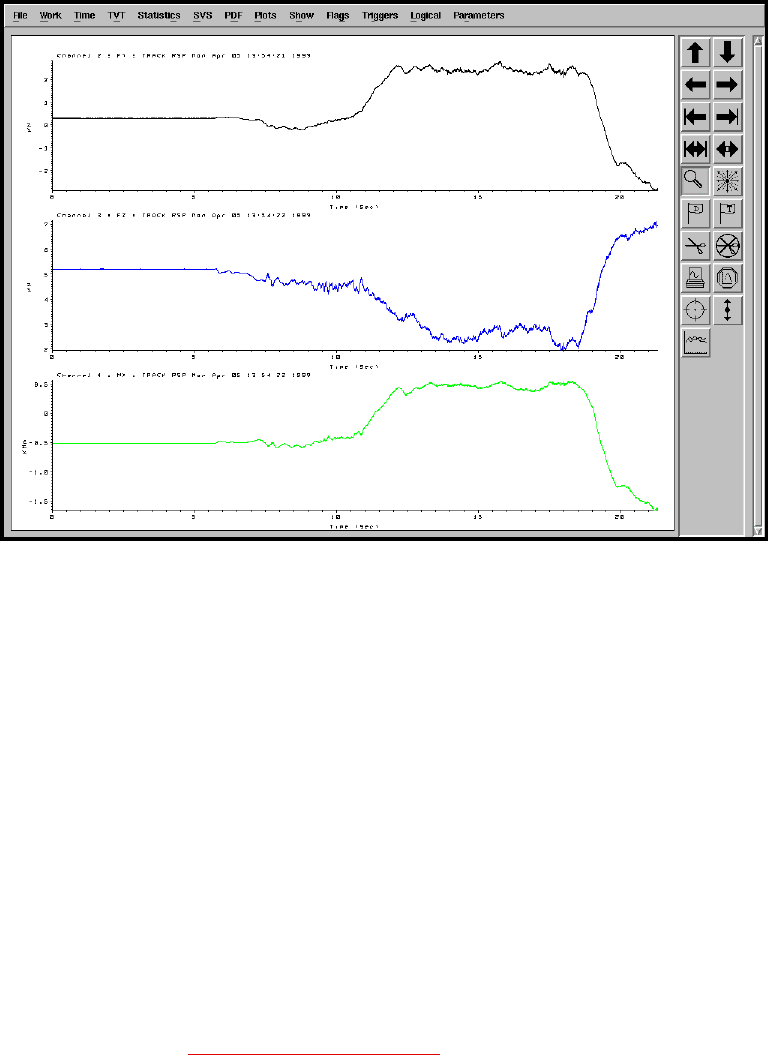
Channel 4 Mx Data The following figure shows the relationship between Mx, Fz, and Fy, during a
cornering event. Fz decreases as the vertical force is shifted to the opposite
wheel. Fy, the lateral force, increases to prevent side slip resulting in an increase
in the overturning moment, Mx.
Mx = Fy x Distance Z +
1
Fz x Distance Y
After zeroing the SWIFT sensor with the wheel off the ground, a moment Mx
will still be present, as the following figure shows.
1. Actual polarities depend upon how the polarity for each signal is set in the TI.
(See “OutputPolarities” in, “Setting up the Transducer Interface.”)
Fy
Fz
Mx