
User`s manual










DS2100 User’s Manual SECTION 7: CANOPEN DRIVE PROFILE: DS402
PAGE 7-14 C27750-001
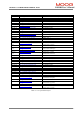
Figure 7.6 Status Word Bits
The modes of operation reflect the supported drive modes listed earlier, and can have the following values.
Value Description
-4 Direct Position Mode (without trigger)
-3 Direct Position Mode (with trigger)
-2 Direct Velocity Mode
-1 Direct Torque Mode
1 Profile Position Mode
3 Profile Velocity Mode
6 Homing Mode
7 Interpolated Position Mode
Table 7.4 Table of modes of operation values
GENERAL ISSUES
1. The Mode of operation is not saved to Non-Volatile Memory, and must be set after power-up/reset.
2. Changing the mode of operation, changes the demand value for the loop, dependent on the mode of
operation selected :-
• Switching to Position Mode, the current position is sampled.The demand (not target value) is set to this
value, to avoid large jumps in demand value. Start new move, by setting set-point bit, or changing
target.
• Switching to Velocity Mode, the demand (not target value) is set to zero. Must write to target to set
velocity.
• Switch to Torque Mode, the demand (not target value) is set to zero. Must write to target to set torque.
3. An additional transition directly from Ready to Switch-On to Operation Enable is allowed, and is listed as
transition 17.
4. Default operation of the quickstop is to transition to switch on disabled state, since the default value of
quickstop_mode=1. By setting quickstop_mode=0, this can be altered to remain in the quickstop state,
after quickstop, and thus Transition 16 listed in DS402 can occur, if after/during quickstop ctl402 is set to
0xF
5. The warning bit is set in the status word, whenever warnings occur in the drive (i.e. U1..U8) as displayed
on the drives 7 segment display.
NOTE:- Upon request of a transition to the operation-enabled state, the drive checks if an enable is
allowed (e.g. Hardware enable is set, and Bus is active), otherwise the transition does not occur.