
User`s manual










DS2100 User's Manual SECTION 5: DS2100 FUNCTIONAL OVERVIEW
PAGE 5-60 C27750-001
current_loop_beta_observer_i-gain 0x60F6 11 no f32 r/w 0.01394492 0 - V/A/Tsamp C A 1293
current_loop_beta_observer_p-gain 0x60F6 12 no f32 r/w 0.19933257 0 - V/A C A 1295
current_loop_foldback_minimum 0x60F6 5 no f32 r/w 0.4 0.1 1 None C A 1284
current_loop_foldback_breakpoint 0x60F6 6 no f32 r/w 140.0 0 - A C A 1285
current_d-axis_observer 0x60F7 4 yes f32 r - - - Amps N A 1096
current_q-axis_observer 0x60F7 5 yes f32 r - - - Amps N A 1097
current_d-axis_demand 0x60F7 6 yes f32 r - - - Amps N A 1098
current_q-axis_demand 0x60F7 7 yes f32 r - - - Amps N A 1099
current_phase_A_demand 0x2410 13 yes s16 r - - - Amps N A 1104
current_phase_B_demand 0x2410 14 yes s16 r - - - Amps N A 1105
current_phase_A_feedback 0x2210 14 yes s16 r - - - see note 1 N A 1069
current_phase_B_feedback 0x2210 15 yes s16 r - - - see note 1 N A 1070
current_loop_q-axis_error 0x60F6 7 yes f32 r - - - Amps N A 1287
current_loop_d-axis_error 0x60F6 8 yes f32 r - - - Amps N A 1286
current_loop_alpha_observer_error 0x60F6 13 yes f32 r - - - Amps N A 1298
current_loop_beta_observer_error 0x60F6 14 yes f32 r - - - Amps N A 1299
current_actual 0x60F7 9 yes f32 r - - - Amps N A 1119
motor_velocity_loop_rate_divider 0x60F6 15 no s16 r/w 1 1 - None C A 1144
motor_velocity_actual 0x60F6 16 yes f32 r - - - Incs/Tsamp N A 1152
motor_velocity_filtered 0x60F6 18 yes f32 r - - - Incs/Tsamp N A 1163
motor_velocity_filter_cutoff_factor 0x60F6 17 no f32 r/w 0.25 0 100 none C A 1162
motor_max_velocity 0x6410 8 no f32 r/w 1000 0 20000 rad/s C A 1082
current_scaling_factor_field_weakening 0x2410 24 no f32 r/w 1.0 0 1.0 none C A 1115
field_weakening_vmax_scaling_factor 0x2450 3 no f32 r/w 0.85 0 1.0 none C A 1193
CONTROL LOOP CONFIGURATION
control_loop_torque_mode_preset 0x2581 6 no u32 r/w 0x8111 - - none C A 1334
control_loop_velocity_mode_preset 0x2581 5 no u32 r/w 0x871A - - none C A 1333
control_loop_position_mode_preset 0x2581 4 no u32 r/w 0x87D8 - - none C A 1332
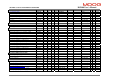
Table 5.32 Control Loops Parameter Access Detail
Note 1: units for the current_loop_phase_x_feedback parameters are nominal_sensed_current / 2
15
. e.g. the parameters have a physical range of ±
nominal_sensed_current represented as a signed 16-bit number.