
Instruction manual










APP - 45
A
PPENDICES
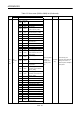
(7) Errors when using an absolute position system (12000 to 12990)
Table 2.10 Output Module Error List (12000 to 12990)
Output module
Error
class
Error
code
Roller
Ball
screw
Rotary
table
Cam
Error cause Processing Corrective action
12010
• A sum check error occurred in the
back-up data (reference values) at
the servo amplifier power supply on
in the virtual mode.
• No home position return.
• Executed the home position
return in the real mode.
12020
• A communication error between the
servo amplifier and encoder
occurred at the servo amplifier
power supply on.
Home position return
signal turns on.
• Check the motor and
encoder cables and executed
the home position return in
the real mode again.
12030
• The amount of change in encoder
current value during operation holds
the following expression :
"Amount of change in encoder
current value / 3.5[ms] >180° of
motor revolution"
It is always checked after the servo
amplifier power supply on (in both
servo ON and OFF states).
Major
error
12040
• During operation, the following
expression holds :
"Encoder current value [PLS]
feedback current value [PLS]
(number of bits in encoder enable
range)".
It is always checked after the servo
amplifier power supply on (in both
servo ON and OFF states).
Home position return
request ON.
• Check the motor and
encoder cables.